Manuals:AR7210FblV5:Setupmenu E/de: Difference between revisions
Shornstein (talk | contribs) No edit summary |
Shornstein (talk | contribs) Created page with "=Zusatzinfo: So funktioniert der Heckkreisel!= Der Kreisel versucht immer einer möglichen Drehung des Helikopters entgegen zu steuern und so das Heck im Flug auf der Stelle z..." |
||
| (9 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
{{TOC_AR7210V5/de|Manuals:AR7210FblV5:Setupmenu_D/de|Manuals:AR7210FblV5:Setupmenu_G/de|SETUPMENU}} | |||
{{TOC_AR7210V5|Manuals:AR7210FblV5:Setupmenu_D/ | |||
__TOC__ | __TOC__ | ||
<br /> | <br /> | ||
Als nächstes werden Heckmechanik, Heckservo und Heckkreisel aufeinander abgestimmt. Dabei bestimmen wir die zulässigen Servoendposition sowie die Steuerrichtung von Fernsteuersender und Heckkreisel. Die Endpositionen dienen in erster Linie dazu, dass der Kreisel das Servo nicht über das mechanische Limit fährt und es dadurch beschädigt. Zu beachten ist aber auch, dass die Endanschläge durch den sinnvoll möglichen Steuerweg der Heckmechanik vorgegeben sein können, da viele Helikopter wesentlich größere Pitchwinkel am Heck zulassen als es notwenig und sinnvoll ist. Dieser ergibt sich aus dem maximal möglichen Anstellwinkel der Heckrotorblätter, welcher noch nicht zu einem Strömungsabriss an den Heckblättern führt. Ein solcher Strömungsabriss kann zu sehr schlechtem Einrastverhalten führen z. B. in Form von sehr weichem Einrasten beim Abstoppen des Hecks oder führt zu schlechtem Ansprechverhalten bei schnellen Richtungswechseln! Halte Dich hier an die Angaben aus der Anleitung des Helikopters.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
= | =Mechanische Einstellung= | ||
Im Laufe der Einstellprozedur muss das Heckservo am Anschluss [CH4] des AR7210BX angesteckt werden. Achte dabei auf korrekte Polarität, das schwarze oder braune Kabel für den Minus-Pol muss unten liegen:<br /> | |||
[[Image:Rudderservo_connection.png|200px|none]]<br /> | [[Image:Rudderservo_connection.png|200px|none]]<br /> | ||
<br /> | <br /> | ||
Montiere dann das Ruderhorn/Servokreuz möglichst in einem 90° Winkel zum Heckanlenkgestänge. Justiere das Anlenkgestänge so, dass die Heckschiebehülse mechanisch korrekt positioniert ist. Idealerweise sollte sie in 90° Position des Servos mittig auf der Heckrotorwelle stehen und die Heckrotorblätter sollten in dieser Position etwas positiven Anstellwinkel entgegen dem Rotordrehmoment haben (z.B. 5° nach rechts bei einem Heli mit rechtsdrehendem Rotor).<br /> | |||
<br /> | <br /> | ||
[[Image:Rudderservo_linkage.png|x100px|none]]<br /> | [[Image:Rudderservo_linkage.png|x100px|none]]<br /> | ||
<br /> | <br /> | ||
Dieser mechanische Vorlauf der Rotorblätter bei Neutralstellung des Servos ist vor allem wichtig, wenn der Heckkreisel im Normal-Modus betrieben wird. Stimmt hier der Vorlauf nicht exakt, so wird der Helikopter im Schwebeflug auf der Hochachse driften. Bei ausschließlicher Verwendung des Heckkreisels im HeadingLock Modus hat diese mechanische Anpassung weniger Bedeutung. Hier wird der Kreisel stets aktiv den Heckrotor ansteuern damit sich der Helikopter nicht dreht, wenn der Hecksteuerknüppel in Mittenposition ist. Für optimale Performance des Heckkreisels empfiehlt es sich aber auch für diesen Modus, die mechanische Abstimmung so genau wie möglich durchzuführen.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
= | =Einstellung am Gerät= | ||
Die Heckeinstellung gliedert sich in zwei Punkte: Bei Punkt E werden zuerst die maximal erlaubten Endpositionen des Heckrotors/Heckservos eingestellt, bei Punkt F stellen wir dann die Steuerrichtungen von Heckservo und Heckkreisel ein. Stecke jetzt das Servo am Ausgang [CH4] des AR7210BX ein und justiere die Mechanik wie oben beschrieben.<br /> | |||
<br /> | <br /> | ||
==SETUP | ==SETUP MENÜ E - Wegbegrenzung Heckrotor== | ||
Mit Hilfe des Hecksteuerknüppels kann das Servo nun in eine Richtung gefahren werden. Steuere dabei das Servo soweit, | |||
dass die Heckschiebehülse gerade noch nicht ansteht und das Servo nicht blockiert (falls der Heckrotor extreme Anstellwinkel | |||
zulässt, kann auch weniger Steuerweg sinnvoll sein!). Die Servoposition kann mit dem Hecksteuerknüppel dabei beliebig oft | |||
nachjustiert werden. Wenn der Steuerknüppel nicht mehr bewegt wird blinkt die Status LED kurz auf und leuchtet dann je | |||
nach eingestellter Richtung blau oder rot.<br /> | |||
<br /> | <br /> | ||
Fahre dann das Servo zur anderen Maximalposition, stelle diese wiederum passend | |||
ein und warte wieder bis die Status LED blinkt. Jetzt muss sie violett leuchten.<br /> | |||
<br /> | <br /> | ||
Drücke kurz auf den Knopf, wenn beide Endpositionen eingestellt sind, um zu Punkt F zu springen. | |||
==SETUP | ==SETUP MENÜ F - Steuerrichtung Heck== | ||
1. | 1. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. '''Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um.'''<br /> | ||
<br /> | <br /> | ||
2. | 2. Stelle jetzt die interne Steuerrichtung des AR7210BX korrekt ein: Wenn der Hecksteuerknüppel nach <span style="color: #4169E1;">'''rechts'''</span> gesteuert wird, dann muss die Status LED <span style="color: #4169E1;">'''blau'''</span> blinken oder leuchten. Wenn der Hecksteuerknüppel nach <span style="color: #DC143C;">'''links'''</span> gesteuert wird, dann muss die Status LED <span style="color: #DC143C;">'''rot'''</span> blinken oder leuchten. '''Wenn diese Anzeige verkehrt herum ist, (also rot = rechts und blau = links) drehe die interne Steuerrichtung um, indem der Rollsteuerknüppel(!) einmal kurz angetippt wird.'''<br /> | ||
<br /> | <br /> | ||
3. Optional: | 3. '''Optional:''' Wenn der Hecksteuerknüppel an den Maximalanschlag gesteuert wird, sollte die Status LED dauerhaft leuchten. Falls das nicht der Fall ist, vergrößere den Steuerausschlag/Servoweg im Fernsteuersender für beide Richtungen genau so weit, dass die Status LED gerade von blinkend auf dauerhaft leuchtend wechselt, wenn der Knüppel die Maximalposition erreicht. Hinweis: Stelle den Servoweg aber nicht zu groß ein. Wenn die LED schon lange vor der Maximalposition leuchtet, reduziere den Ausschlag im Sender entsprechend.<br /> | ||
<br /> | <br /> | ||
{{QUOTE| | {{QUOTE|'''Halte unbedingt die vorgegebene Reihenfolge ein!''' Stelle immer erst die Servolaufrichtung korrekt ein und prüfe dann die Steuerrichtung des AR7210BX. | ||
'''Die interne Steuerrichtung ändert nicht die Servolaufrichtung! Diese dient nur dazu, dass der Heckkreisel beim Korrigieren der Fluglage das Heck in die richtige Richtung steuert.''' Gehe beim Prüfen und Einstellen der Steuerrichtungen sehr gewissenhaft vor. Eine falsche Steuerrichtung kann zum Absturz führen!<br /> | |||
<br /> | <br /> | ||
''' | '''Zusätzlich kann die Wirkrichtung des Heckkreisels überprüft werden:''' Wenn der Helikopter von Hand um die Hochachse gedreht wird, muss das System das Heckservo so ansteuern, dass das Heck einen Schub entgegen der Drehung entwickelt. Der Heckkreisel versucht also, die Drehung durch Gegensteuern zu stoppen, genauso als würde der Pilot versuchen, die Drehung abzufangen. Die Status LED wird übrigens immer '''blau''' leuchten, wenn der Helikopter rechts herum gedreht wird, und '''rot''' leuchten, wenn die Nase des Helis nach links gedreht wird. So bekommst Du einen kleinen Hinweis, welche Farbe für '''rechts''' und welche für '''links''' steht, wenn Du das Grundsetup später einmal auf dem Flugfeld durchführst und Dich nicht erinnern kannst, welche Farbe für welche (Knüppel-)Steuerrichtung steht!}}<br /> | ||
<br /> | <br /> | ||
= | =Einstellung über StudioXm= | ||
<br /> | <br /> | ||
[[File:SetupEF_mobile.png|x250px]] | [[File:SetupEF_mobile.png|x250px]]<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
1. | 1. Wenn Du den Hecksteuerknüppel voll nach rechts oder links bewegst, sollte die Status LED am AR7210BX dauerhaft leuchten und das Label ''rechts'' oder ''links'' sollte in entsprechender Farbe unterlegt sein. Wenn der Steuerknüppel nicht weit genug ausschlägt, wird die Anzeige "Vergrößern!" erscheinen. In diesem Fall vergrößere den Steuerausschlag/Servoweg im Fernsteuersender für beide Richtungen genau so weit, dass die Status LED gerade von blinkend auf dauerhaft leuchtend wechselt bzw. das Label in der Software entsprechend aufleuchtet und die Meldung verschwindet, wenn der Knüppel die Maximalposition erreicht. Hinweis: Stelle den Servoweg aber nicht zu groß ein. Wenn die LED schon lange vor der Maximalposition leuchtet, reduziere den Ausschlag im Sender entsprechend.<br /> | ||
<br /> | <br /> | ||
2. | 2. Stecke jetzt das Heckservo am Ausgang [CH4] des AR7210BX an und stelle die Mechanik wie oben beschrieben ein. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. '''Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um.''' Wenn sich das Servo beim Steuern in die richtige Richtung bewegt, ist die interne Steuerrichtung des AR7210BXS zu prüfen und ggf. einzustellen: Wenn der Hecksteuerknüppel nach <span style="color: #4169E1;">'''rechts'''</span>, gesteuert wird, dann muss die Status LED <span style="color: #4169E1;">'''blau'''</span> leuchten und in der Software muss <span style="color: #4169E1;">'''rechts'''</span> angezeigt werden. Wenn der Hecksteuerknüppel nach <span style="color: #DC143C;">'''links'''</span> gesteuert wird, dann muss die Status LED <span style="color: #DC143C;">'''rot'''</span> leuchten und in der Software muss <span style="color: #DC143C;">'''links'''</span> angezeigt werden. '''Wenn diese Anzeige verkehrt herum ist, (also rot = rechts und blau = links) drehe die interne Steuerrichtung durch die Auswahl von "normal" oder "umgedreht" um.'''<br /> | ||
<br /> | <br /> | ||
3. | 3. Stelle als letztes die Wegbegrenzung ein. Steuere dazu das Servo vorsichtig an die Endpositionen und reduziere/vergrößere die beiden Werte für rechts und links, so dass die Wegbegrenung optimal eingestellt ist (s.o.).<br /> | ||
<br /> | <br /> | ||
{{QUOTE| | {{QUOTE|'''Halte unbedingt die vorgegebene Reihenfolge ein!''' Stelle immer erst die Servolaufrichtung korrekt ein und prüfe dann die Steuerrichtung des AR7210BX. | ||
'''Die interne Steuerrichtung ändert nicht die Servolaufrichtung! Diese dient nur dazu, dass der Heckkreisel beim Korrigieren der Fluglage das Heck in die richtige Richtung steuert.''' Gehe beim Prüfen und Einstellen der Steuerrichtungen sehr gewissenhaft vor. Eine falsche Steuerrichtung kann zum Absturz führen!<br /> | |||
<br /> | <br /> | ||
''' | '''Zusätzlich kann die Wirkrichtung des Heckkreisels überprüft werden:''' Wenn der Helikopter von Hand um die Hochachse gedreht wird, muss das System das Heckservo so ansteuern, dass das Heck einen Schub entgegen der Drehung entwickelt. Der Heckkreisel versucht also, die Drehung durch Gegensteuern zu stoppen, genauso als würde der Pilot versuchen, die Drehung abzufangen.}}<br /> | ||
<br /> | <br /> | ||
= | =Zusatzinfo: Warum müssen die Endpositionen im Sender verändert werden?= | ||
Da jeder Fernsteuersender und jedes Fernsteuersystem etwas andere Steuerausschläge macht stellt dies sicher, dass die Steuerung reproduzierbar immer dieselben Ausschläge macht. Später kann über die Parametereinstellung "Steuerverhalten", genau vorgegeben werden, wie und wie schnell sich der Helikopter um die Hochachse drehen soll.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
= | =Zusatzinfo: So funktioniert der Heckkreisel!= | ||
Der Kreisel versucht immer einer möglichen Drehung des Helikopters entgegen zu steuern und so das Heck im Flug auf der Stelle zu halten. Drehe den Helikopter von Hand um dessen Hochachse in eine beliebige Richtung. Der Heckkreisel muss nun eine Servobewegung ausführen, die den Heckrotor so ansteuert, dass er Schub in die Gegenrichtung produziert. Wird also z.B. die Nase des Helikopters nach rechts gedreht, so muss der Kreisel nach links gegensteuern, genauso als würdest Du mit der Fernsteuerung nach links steuern. | |||
<br /> | <br /> | ||
<gallery widths="200" heights="250" style="font-size: 80%;"> | <gallery widths="200" heights="250" style="font-size: 80%;"> | ||
Image:Tailgyro_correct.png| | Image:Tailgyro_correct.png|Wenn das Heck mit der Hand nach rechts bzw. die Spitze des Helis nach links bewegt wird, wird der Heckkreisel eine Steuerbewegung nach rechts ausführen, genauso als würde der Pilot mit dem Hecksteuerknüppel nach rechts steuern. | ||
Image:Tailgyro_wrong.png| | Image:Tailgyro_wrong.png|Wenn das Heck mit der Hand nach rechts bzw. die Spitze des Helis nach links bewegt wird, wird der Heckkreisel eine Steuerbewegung nach links ausführen und so wird sich der Heli nur noch schneller in diese Richtung drehen. | ||
</gallery> | </gallery> | ||
Hinweis: Am hier gezeigten Beispiel sieht man das Heck eines ALIGN T-Rex 500 Helikopter. Die Mechanik kann sich an Deinem Helikopter ggf. anders verhalten, die Schiebehülse könnte z.B. beim Steuern nach rechts in die andere Richtung fahren. In erster Linie kommt es darauf an, wie die Heckblatthalter angelenkt werden und in welche Richtung der Heckrotor den nötigen Schub erzeugt. In der Anleitung zu Deinem Helikopter findest Du nähere Hinweise, in welche Richtung der Heckrotor steuern muss, um eine bestimmte Bewegung auszuführen.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
Latest revision as of 12:54, 12 July 2018
Als nächstes werden Heckmechanik, Heckservo und Heckkreisel aufeinander abgestimmt. Dabei bestimmen wir die zulässigen Servoendposition sowie die Steuerrichtung von Fernsteuersender und Heckkreisel. Die Endpositionen dienen in erster Linie dazu, dass der Kreisel das Servo nicht über das mechanische Limit fährt und es dadurch beschädigt. Zu beachten ist aber auch, dass die Endanschläge durch den sinnvoll möglichen Steuerweg der Heckmechanik vorgegeben sein können, da viele Helikopter wesentlich größere Pitchwinkel am Heck zulassen als es notwenig und sinnvoll ist. Dieser ergibt sich aus dem maximal möglichen Anstellwinkel der Heckrotorblätter, welcher noch nicht zu einem Strömungsabriss an den Heckblättern führt. Ein solcher Strömungsabriss kann zu sehr schlechtem Einrastverhalten führen z. B. in Form von sehr weichem Einrasten beim Abstoppen des Hecks oder führt zu schlechtem Ansprechverhalten bei schnellen Richtungswechseln! Halte Dich hier an die Angaben aus der Anleitung des Helikopters.
Mechanische Einstellung
Im Laufe der Einstellprozedur muss das Heckservo am Anschluss [CH4] des AR7210BX angesteckt werden. Achte dabei auf korrekte Polarität, das schwarze oder braune Kabel für den Minus-Pol muss unten liegen:

Montiere dann das Ruderhorn/Servokreuz möglichst in einem 90° Winkel zum Heckanlenkgestänge. Justiere das Anlenkgestänge so, dass die Heckschiebehülse mechanisch korrekt positioniert ist. Idealerweise sollte sie in 90° Position des Servos mittig auf der Heckrotorwelle stehen und die Heckrotorblätter sollten in dieser Position etwas positiven Anstellwinkel entgegen dem Rotordrehmoment haben (z.B. 5° nach rechts bei einem Heli mit rechtsdrehendem Rotor).

Dieser mechanische Vorlauf der Rotorblätter bei Neutralstellung des Servos ist vor allem wichtig, wenn der Heckkreisel im Normal-Modus betrieben wird. Stimmt hier der Vorlauf nicht exakt, so wird der Helikopter im Schwebeflug auf der Hochachse driften. Bei ausschließlicher Verwendung des Heckkreisels im HeadingLock Modus hat diese mechanische Anpassung weniger Bedeutung. Hier wird der Kreisel stets aktiv den Heckrotor ansteuern damit sich der Helikopter nicht dreht, wenn der Hecksteuerknüppel in Mittenposition ist. Für optimale Performance des Heckkreisels empfiehlt es sich aber auch für diesen Modus, die mechanische Abstimmung so genau wie möglich durchzuführen.
Einstellung am Gerät
Die Heckeinstellung gliedert sich in zwei Punkte: Bei Punkt E werden zuerst die maximal erlaubten Endpositionen des Heckrotors/Heckservos eingestellt, bei Punkt F stellen wir dann die Steuerrichtungen von Heckservo und Heckkreisel ein. Stecke jetzt das Servo am Ausgang [CH4] des AR7210BX ein und justiere die Mechanik wie oben beschrieben.
SETUP MENÜ E - Wegbegrenzung Heckrotor
Mit Hilfe des Hecksteuerknüppels kann das Servo nun in eine Richtung gefahren werden. Steuere dabei das Servo soweit,
dass die Heckschiebehülse gerade noch nicht ansteht und das Servo nicht blockiert (falls der Heckrotor extreme Anstellwinkel
zulässt, kann auch weniger Steuerweg sinnvoll sein!). Die Servoposition kann mit dem Hecksteuerknüppel dabei beliebig oft
nachjustiert werden. Wenn der Steuerknüppel nicht mehr bewegt wird blinkt die Status LED kurz auf und leuchtet dann je
nach eingestellter Richtung blau oder rot.
Fahre dann das Servo zur anderen Maximalposition, stelle diese wiederum passend
ein und warte wieder bis die Status LED blinkt. Jetzt muss sie violett leuchten.
Drücke kurz auf den Knopf, wenn beide Endpositionen eingestellt sind, um zu Punkt F zu springen.
SETUP MENÜ F - Steuerrichtung Heck
1. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um.
2. Stelle jetzt die interne Steuerrichtung des AR7210BX korrekt ein: Wenn der Hecksteuerknüppel nach rechts gesteuert wird, dann muss die Status LED blau blinken oder leuchten. Wenn der Hecksteuerknüppel nach links gesteuert wird, dann muss die Status LED rot blinken oder leuchten. Wenn diese Anzeige verkehrt herum ist, (also rot = rechts und blau = links) drehe die interne Steuerrichtung um, indem der Rollsteuerknüppel(!) einmal kurz angetippt wird.
3. Optional: Wenn der Hecksteuerknüppel an den Maximalanschlag gesteuert wird, sollte die Status LED dauerhaft leuchten. Falls das nicht der Fall ist, vergrößere den Steuerausschlag/Servoweg im Fernsteuersender für beide Richtungen genau so weit, dass die Status LED gerade von blinkend auf dauerhaft leuchtend wechselt, wenn der Knüppel die Maximalposition erreicht. Hinweis: Stelle den Servoweg aber nicht zu groß ein. Wenn die LED schon lange vor der Maximalposition leuchtet, reduziere den Ausschlag im Sender entsprechend.
Halte unbedingt die vorgegebene Reihenfolge ein! Stelle immer erst die Servolaufrichtung korrekt ein und prüfe dann die Steuerrichtung des AR7210BX. Die interne Steuerrichtung ändert nicht die Servolaufrichtung! Diese dient nur dazu, dass der Heckkreisel beim Korrigieren der Fluglage das Heck in die richtige Richtung steuert. Gehe beim Prüfen und Einstellen der Steuerrichtungen sehr gewissenhaft vor. Eine falsche Steuerrichtung kann zum Absturz führen!
Zusätzlich kann die Wirkrichtung des Heckkreisels überprüft werden: Wenn der Helikopter von Hand um die Hochachse gedreht wird, muss das System das Heckservo so ansteuern, dass das Heck einen Schub entgegen der Drehung entwickelt. Der Heckkreisel versucht also, die Drehung durch Gegensteuern zu stoppen, genauso als würde der Pilot versuchen, die Drehung abzufangen. Die Status LED wird übrigens immer blau leuchten, wenn der Helikopter rechts herum gedreht wird, und rot leuchten, wenn die Nase des Helis nach links gedreht wird. So bekommst Du einen kleinen Hinweis, welche Farbe für rechts und welche für links steht, wenn Du das Grundsetup später einmal auf dem Flugfeld durchführst und Dich nicht erinnern kannst, welche Farbe für welche (Knüppel-)Steuerrichtung steht!
Einstellung über StudioXm
File:SetupEF mobile.png
1. Wenn Du den Hecksteuerknüppel voll nach rechts oder links bewegst, sollte die Status LED am AR7210BX dauerhaft leuchten und das Label rechts oder links sollte in entsprechender Farbe unterlegt sein. Wenn der Steuerknüppel nicht weit genug ausschlägt, wird die Anzeige "Vergrößern!" erscheinen. In diesem Fall vergrößere den Steuerausschlag/Servoweg im Fernsteuersender für beide Richtungen genau so weit, dass die Status LED gerade von blinkend auf dauerhaft leuchtend wechselt bzw. das Label in der Software entsprechend aufleuchtet und die Meldung verschwindet, wenn der Knüppel die Maximalposition erreicht. Hinweis: Stelle den Servoweg aber nicht zu groß ein. Wenn die LED schon lange vor der Maximalposition leuchtet, reduziere den Ausschlag im Sender entsprechend.
2. Stecke jetzt das Heckservo am Ausgang [CH4] des AR7210BX an und stelle die Mechanik wie oben beschrieben ein. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um. Wenn sich das Servo beim Steuern in die richtige Richtung bewegt, ist die interne Steuerrichtung des AR7210BXS zu prüfen und ggf. einzustellen: Wenn der Hecksteuerknüppel nach rechts, gesteuert wird, dann muss die Status LED blau leuchten und in der Software muss rechts angezeigt werden. Wenn der Hecksteuerknüppel nach links gesteuert wird, dann muss die Status LED rot leuchten und in der Software muss links angezeigt werden. Wenn diese Anzeige verkehrt herum ist, (also rot = rechts und blau = links) drehe die interne Steuerrichtung durch die Auswahl von "normal" oder "umgedreht" um.
3. Stelle als letztes die Wegbegrenzung ein. Steuere dazu das Servo vorsichtig an die Endpositionen und reduziere/vergrößere die beiden Werte für rechts und links, so dass die Wegbegrenung optimal eingestellt ist (s.o.).
Halte unbedingt die vorgegebene Reihenfolge ein! Stelle immer erst die Servolaufrichtung korrekt ein und prüfe dann die Steuerrichtung des AR7210BX. Die interne Steuerrichtung ändert nicht die Servolaufrichtung! Diese dient nur dazu, dass der Heckkreisel beim Korrigieren der Fluglage das Heck in die richtige Richtung steuert. Gehe beim Prüfen und Einstellen der Steuerrichtungen sehr gewissenhaft vor. Eine falsche Steuerrichtung kann zum Absturz führen!
Zusätzlich kann die Wirkrichtung des Heckkreisels überprüft werden: Wenn der Helikopter von Hand um die Hochachse gedreht wird, muss das System das Heckservo so ansteuern, dass das Heck einen Schub entgegen der Drehung entwickelt. Der Heckkreisel versucht also, die Drehung durch Gegensteuern zu stoppen, genauso als würde der Pilot versuchen, die Drehung abzufangen.
Zusatzinfo: Warum müssen die Endpositionen im Sender verändert werden?
Da jeder Fernsteuersender und jedes Fernsteuersystem etwas andere Steuerausschläge macht stellt dies sicher, dass die Steuerung reproduzierbar immer dieselben Ausschläge macht. Später kann über die Parametereinstellung "Steuerverhalten", genau vorgegeben werden, wie und wie schnell sich der Helikopter um die Hochachse drehen soll.
Zusatzinfo: So funktioniert der Heckkreisel!
Der Kreisel versucht immer einer möglichen Drehung des Helikopters entgegen zu steuern und so das Heck im Flug auf der Stelle zu halten. Drehe den Helikopter von Hand um dessen Hochachse in eine beliebige Richtung. Der Heckkreisel muss nun eine Servobewegung ausführen, die den Heckrotor so ansteuert, dass er Schub in die Gegenrichtung produziert. Wird also z.B. die Nase des Helikopters nach rechts gedreht, so muss der Kreisel nach links gegensteuern, genauso als würdest Du mit der Fernsteuerung nach links steuern.
-
 Wenn das Heck mit der Hand nach rechts bzw. die Spitze des Helis nach links bewegt wird, wird der Heckkreisel eine Steuerbewegung nach rechts ausführen, genauso als würde der Pilot mit dem Hecksteuerknüppel nach rechts steuern.
Wenn das Heck mit der Hand nach rechts bzw. die Spitze des Helis nach links bewegt wird, wird der Heckkreisel eine Steuerbewegung nach rechts ausführen, genauso als würde der Pilot mit dem Hecksteuerknüppel nach rechts steuern. -
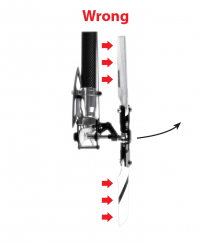 Wenn das Heck mit der Hand nach rechts bzw. die Spitze des Helis nach links bewegt wird, wird der Heckkreisel eine Steuerbewegung nach links ausführen und so wird sich der Heli nur noch schneller in diese Richtung drehen.
Wenn das Heck mit der Hand nach rechts bzw. die Spitze des Helis nach links bewegt wird, wird der Heckkreisel eine Steuerbewegung nach links ausführen und so wird sich der Heli nur noch schneller in diese Richtung drehen.


{kind=link}
Hinweis: Am hier gezeigten Beispiel sieht man das Heck eines ALIGN T-Rex 500 Helikopter. Die Mechanik kann sich an Deinem Helikopter ggf. anders verhalten, die Schiebehülse könnte z.B. beim Steuern nach rechts in die andere Richtung fahren. In erster Linie kommt es darauf an, wie die Heckblatthalter angelenkt werden und in welche Richtung der Heckrotor den nötigen Schub erzeugt. In der Anleitung zu Deinem Helikopter findest Du nähere Hinweise, in welche Richtung der Heckrotor steuern muss, um eine bestimmte Bewegung auszuführen.