Manuals:MBPlusFblV5:ReceiverType/de: Difference between revisions
Shornstein (talk | contribs) No edit summary |
Shornstein (talk | contribs) No edit summary |
||
| (5 intermediate revisions by the same user not shown) | |||
| Line 168: | Line 168: | ||
==Einstellpunkt N - Motor Failsafe== | ==Einstellpunkt N - Motor Failsafe== | ||
Bei Einstellpunkt '''N''' muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall: | |||
Bei Einstellpunkt '''N''' muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall: | |||
* wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist) | * wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist) | ||
* wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird | * wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird | ||
* wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird. | * wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird. | ||
* wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die Failsafe Position | * wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die Failsafe Position | ||
<br /> | <br /> | ||
'''Hinweis:''' | '''Hinweis:''' | ||
* Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren. | * Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren. | ||
* Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.</ | * Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.<br /> | ||
< | <br /> | ||
Bring den Motorkanal an der Fernsteuerung auf die gewünschte Position und drücke einmal kurz auf den Taster. '''Sollte am Ausgang [CH5] kein Servo oder Motorsteller angesteckt sein, so drücke ebenfalls auf den Taster um das Setup abzuschließen!'''</ | Bring den Motorkanal an der Fernsteuerung auf die gewünschte Position und drücke einmal kurz auf den Taster. '''Sollte am Ausgang [CH5] kein Servo oder Motorsteller angesteckt sein, so drücke ebenfalls auf den Taster um das Setup abzuschließen!'''<br /> | ||
<br /> | |||
[[File:Failsafe_setup.png|noframe|none|x250px]]<br /> | [[File:Failsafe_setup.png|noframe|none|x250px]]<br /> | ||
<br /> | <br /> | ||
| Line 190: | Line 187: | ||
<br /> | <br /> | ||
= | =Einstellung mit StudioX= | ||
Wähle in der StudioX Software oben das Tab "Steuersignale", wenn das MICROBEAST PLUS in der StudioX Software erkannt wurde. Die Einstelloptionen/Einstellpunkte die man hier sieht sind mehr oder weniger identisch zur Einstellung des EMPFÄNGER MENÜs am Gerät. In der ersten Reihe (Menüpunkt A) sieht man, welcher Empfängertyp aktuell gewählt ist. In den Reihen darunter sieht man die aktuelle Funktionsbelegung der Steuerkanäle (falls vorgesehen) und in der untersten Reihe ist die gespeicherte Failsafe Position für den Motorkanal zu sehen.<br /> | |||
<br /> | <br /> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20008.PNG"> | <img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20008.PNG"> | ||
<div> | <div class="iostext">Wähle <b>Steuersignale</b></div> | ||
</div> | </div> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20011.PNG"> | <img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20011.PNG"> | ||
<div class="iostext"> | <div class="iostext">In der sich öffnenden Übersicht findest Du Informationen zum aktuell gewählten Empfängertyp, über die Zuweisung der Steuerfunktionen und die Failsafe Einstellung</div> | ||
</div> | </div> | ||
<br /> | <br /> | ||
| Line 214: | Line 211: | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20014.PNG"> | <img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20014.PNG"> | ||
<div class="iostext">...und warte bis der | <div class="iostext">...und warte bis der Empfänger erkannt wurde</div> | ||
</div> | </div> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
| Line 225: | Line 222: | ||
==Funktionszuordnung== | ==Funktionszuordnung== | ||
=== | ===Vorkonfigurierte Funktionsbelegung=== | ||
Wenn die Belegung des Fernsteuersender zu der Angabe in den oben aufgeführten Tabellen passt, kann auf eine manuelle Zuweisung verzichtet und die Punkte B bis I (J) übersprungen werden. Wähle dazu '''Voreinstellung''' im Dialog "Neuer Empfänger erkannt!" Die Funktionsbelegung des Senders ist üblicherweise im Handbuch des Fernsteuersenders abgedruckt oder kann durch Zuhilfenahme des Servomonitors vom Sender herausgefunden werden.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
| Line 271: | Line 268: | ||
<br /> | <br /> | ||
== | ==Motor Failsafe== | ||
Beim untersten Einstellpunkt wird die Failsafe-Position für den Motorkanal hinterlegt. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall: | |||
* | * wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist) | ||
* | * wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird | ||
* | * wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird. | ||
* wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die Failsafe Position<br /> | |||
<br /> | <br /> | ||
''' | '''Hinweis:''' | ||
* | * Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren. | ||
* | * Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.<br /> | ||
<br /> | <br /> | ||
Klicke in der Abfrage "Motor Failsafe Position setzen" auf '''Fortfahren''' und bring den Motorkanal an der Fernsteuerung auf die gewünschte Position. Drücke dann auf '''Speichern''' um die aktuelle Position zu speichern. '''Wenn am Ausgang [CH5] kein Servo oder Motorsteller angesteckt ist, wähle einfach '''Überspringen'''! | |||
<br /> | <br /> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20025.PNG"> | <img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20025.PNG"> | ||
<div class="iostext"> | <div class="iostext">Wähle nach der Funktionszuordnung <b>Fortfahren</b>, um mit dem Einlernen der Failsafe Position zu beginnen</div> | ||
</div> | </div> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20027.PNG"> | <img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20027.PNG"> | ||
<div class="iostext"> | <div class="iostext">Bringe das Gas in die niedrigste Position, in welcher der Motor abgeschaltet ist</div> | ||
</div> | </div> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20028.PNG"> | <img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20028.PNG"> | ||
<div class="iostext"> | <div class="iostext">Wähle <b>Speichern</b>, um die Failsafe Position zu speichern</div> | ||
</div> | </div><br /> | ||
<br /> | <br /> | ||
{{WARNING_QUOTE|'''Für die Failsafeeinstellung ist der Ausgang [CH5] aktiv und reagiert entsprechend auf Bewegungen des Motorkanals, so dass die Failsafeposition kontrolliert werden kann.''' Trenne bei einem Elektromodell unbedingt den Motor vom Hauptgetriebe, so dass der Rotor des Helis nicht aus Versehen zu drehen beginnt! | |||
}} | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
Latest revision as of 21:36, 10 July 2019
An das MICROBEAST PLUS kann eine Vielzahl von unterschiedlichen Empfängertypen mit verschiedenen Arten von Ausgangssignalen angeschlossen werden. Welcher Empfängertyp bzw. welches Signal/Übertragungsprotokoll verwendet wird, muss vor der eigentlichen Inbetriebnahme im EMPFÄNGER MENÜ eingelernt werden. Nur so sind die Eingänge am MICROBEAST PLUS entsprechend konfiguriert und die Steuersignale können korrekt dekodiert werden. Wenn ein Singleline-Empfänger (Summensignal-Empfänger) verwendet wird, muss in diesem Menü zusätzlich die Zuordnung der Fernsteuerkanälen zu den einzelnen Funktionen bestimmt werden. Zu jedem Fernsteuertyp ist im MICROBEAST PLUS eine vorkonfigurierte Funktionsbelegung hinterlegt. Alternativ kann auch eine individuelle Funktionsbelegung durchgeführt werden, falls die vorkonfigurierte Belegung nicht zur verwendeten Fernsteueranlage passt. Dies ist nötig weil hier alle Steuerkanäle als Datenpaket oder Signalkette versendet werden und nicht von vorn herein klar ist, welche Kanäle welcher Steuerfunktion zugeordnet sind. Abschließend wird noch die Failsafe-Position eingestellt. Sie bestimmt, in welche Position das Gas gebracht wird, wenn das Eingangssignal verloren geht, z. B. falls der Empfänger abgesteckt oder die Signalausgabe abgeschaltet wird.
In der Werkseinstellung ist der Typ "Standard Empfänger" voreingestellt. Wenn das MICROBEAST PLUS neu eingebaut und mit diesem Empfängertyp verwendet wird, muss die Empfängereinstellung nicht durchgeführt werden.

Vordefinierte Funktionsbelegung für Summensignalempfänger
Spektrum® DMS2/DSMX oder JR® RJ01 DMSS Einzelsatellit
| GAS | ROL | NCK | HCK | KRE | PIT | K7 | K8 |
| Motor [CH5] | Roll | Nick | Heck (Gier) | Heckkreisel | Pitch | Aux [CH6]* | Governor (Verbrenner) |
PPM Summensignal (SPPM)
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Pitch | Roll | Nick | Heck (Gier) | Aux [CH6]* | Motor [CH5] | Heckkreisel | Governor (Verbrenner) |
Futaba® SBus/Sbus2 oder BEASTX® FASST kompatibler Empfänger
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Roll | Nick | Motor [CH5] | Heck (Gier) | Heckkreisel | Pitch | Aux [CH6]* | Governor (Verbrenner) |
Multiplex® SRXL v1 und v2, JR® XBUS Mode B, JETI® UDI 12 + 16ch
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Roll | Nick | Heck (Gier) | Pitch | Motor [CH5] | Heckkreisel | Aux [CH6]* | Governor (Verbrenner) |
Graupner® SUMD
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Pitch | Roll | Nick | Heck (Gier) | Aux [CH6]* | Motor [CH5] | Heckkreisel | Governor (nitro) |
Spektrum® SRXL
| GAS | ROL | NCK | HCK | KRE | PIT | K7 | K8 |
| Motor [CH5] | Roll | Nick | Heck (Gier) | Heckkreisel | Pitch | Aux [CH6]* | Governor (Verbrenner) |
Jeti® ExBus
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Motor [CH5] | Roll | Nick | Pitch | Heck (Gier) | Heckkreisel | Aux [CH6]* | Governor (Verbrenner) |
ALIGN®/FlySky® iBus
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Roll | Nick | Motor [CH5] | Heck (Gier) | Heckkreisel | Pitch | Aux [CH6]* | Governor (Verbrenner) |
Belegung bei PROEDITION firmware (*)
Wenn das PROEDITION Firmware Upgrade auf dem Gerät installiert ist, dann wird der Kanal vom Zusatzausgang Aux [CH6] zur Steuerung der AttitudeControl verwendet. Der Zusatzausgang Aux Aux [CH6] wird hingegen über Kanal 9 angesteuert.
Hinweis: Falls die AttitudeControl nicht über einen eigenen Steuerkanal angesteuert werden soll oder kann (z.B. weil der Sender nur über 6 Fernsteuerkanäle verfügt), kann die Funktionszuweisung für die AttitudeControl manuell übersprungen werden.
Einstellung am Gerät
Um ins Empfänger-Einstellmenü zu gelangen muss das MICROBEAST PLUS ausgeschaltet sein. Drücke und halte den Knopf bevor(!) und während Du das Gerät einschaltest. Die Menü LEDs A bis N leuchten nacheinander auf. Lass den Knopf jetzt los. Die Menü LED A wird blinken und die Status LED Farbe zeigt an, welche Art von Eingangssignal momentan ausgewählt ist.

Beachte bitte, dass der Motorausgang [CH5] am MICROBEAST PLUS bei den ersten Punkten des Empfänger-Einstellmenüs nicht angesteuert wird (gilt nur bei Verwendung eine Summensignal-Empfängers). Zum Einstellen der Failsafe-Position bei Einstellpunkt N wird der Ausgang hingegen aktiv geschaltet! Wenn ein Motorsteller mit BEC angeschlossen ist, um die Empfangsanlage mit Strom zu versorgen, stelle unbedingt sicher, dass der Motor vom Hauptgetriebe abgekoppelt ist! Bei einem Heli mit Verbrennungsmotor sollte vor der ersten Inbetriebnahme das Servohorn vom Gasservo entfernt werden, um ein Blockieren des Anlenkgestänges wegen falscher Gaseinstellung zu verhindern.
Einstellpunkt A - Empfängertyp
Damit der angesteckte Empfängertyp erkannt werden kann, muss der Fernsteuersender eingeschaltet und mit dem Empfänger gebunden sein. Stelle auch sicher, dass die Grundeinstellung des Sender wie im Kapitel Fersteuersystem beschrieben durchgeführt wurde. Drücke dann bei Einstellpunkt A einfach einmal kurz auf den Knopf, um den Scan-Vorgang zu starten. Die Farbe der Status LED gibt jeweils an, nach welchem Empfängertyp gerade gesucht wird. Sobald der entsprechende Typ erkannt wurde, wird dieser abgespeichert und die Einstellprozedur springt automatisch zu Einstellpunkt B, falls ein Summensignal -Empfänger verwendet wird. Wenn ein Standardempfänger verwendet wird, ist soweit alles Notwendige einstellt und das EMPFÄNGER MENÜ wird geschlossen.
Falls die Empfängersuche fehlschlägt, wird das System bei Einstellpunkt A bleiben und die Status LED signalisiert mit rotem Blinken, dass kein passender Typ gefunden wurde. Sollte das passieren, überprüfe nochmal ob alles korrekt angeschlossen ist, der Sender korrekt mit dem Empfänger zusammenarbeitet, die Versorgungsspannung ausreichend ist und ob der Empfänger tatsächlich die Steuersignale ausgibt und ob es sich um ein unterstützes Datenformat handelt.
| Status-LED | Empfängertyp/Übertragungsprotokoll |
|---|---|
| aus | Spektrum®/JR® Einzelsatellit |
| violett | SPPM (PPM Summensignal) |
| rot | Serielles Datensignal |
| blau | Standard Empfänger |
Funktionszuordnung
Vorkonfigurierte Funktionsbelegung
Wenn die Belegung des Fernsteuersender zu der Angabe in den oben aufgeführten Tabellen passt, kann auf eine manuelle Zuweisung verzichtet und die Punkte B bis I (J) übersprungen werden. Wenn Punkt B blinkt, drücke und halte den Knopf für mindestens 2 Sekunden, um die für den jeweiligen Fernsteuertyp vorkonfigurierte Funktionsbelegung zu laden. Die Menü LED springt dann direkt zu Punkt N weiter, wenn der Knopf losgelassen wird. Die Funktionsbelegung des Senders ist üblicherweise im Handbuch des Fernsteuersenders abgedruckt oder kann durch Zuhilfenahme des Servomonitors vom Sender herausgefunden werden.
 |
Manuelle Funktionszuweisung
Wenn die Steuerbelegung des Fernsteuersenders nicht der oben vorgegebenen Standardbelegung entspricht, können die einzelnen Steuerkanäle bei den Punkten B - I (J bei PROEDITION) beliebig den einzelnen Steuerfunktionen zugeordnet werden. Dies macht man einfach, indem man die gewünschte Funktion am Sender betätigt, wenn man beim Punkt für die entsprechende Funktion angelangt ist. Die Status LED wird dann kurz in blauer Farbe aufblinken, wenn der Steuerkanal bzw. die Knüppelbewegung erkannt. Es ist dabei egal, in welche Richtung und wie weit der Kanal betätigt wird. Wichtig ist nur, dass sich immer nur ein Kanal bewegt, andernfalls kann das System nicht erkennen, welcher Kanal nun zugewiesen werden soll. Die Zuweisung kann bei jedem Punkt beliebig oft wiederholt oder geändert werden, gespeichert wird immer der zuletzt erkannte Kanal.
Drücke dann zum Speichern der Zuweisung auf den Knopf, dann springt das System zur nächsten Funktionszuweisung. Ein einmal eingelernter Kanal wird im Folgenden übrigens ignoriert. So können z.B. Pitch und Motor durch Bewegen des Pitchknüppels eingelernt werden, indem zuerst bei Punkt B der Motorkanal über den Hold - Schalter stillgelegt wird, und dann beim Einlernen der Motorfunktion bei Punkt G einfach wieder zugeschaltet wird. Der Pitchkanal wird dann ignoriert, weil er bei Punkt B schon für Pitch zugewiesen wurde!
Die ersten 6 Funktionen müssen zugewiesen werden, da sie für die grundlegende Flugsteuerung des Modells notwendig sind. Die anderen Funktionen sind nur optional und können ohne Zuweisung per Tastendruck übersprungen werden, wenn sie nicht benötigt werden oder nicht ausreichend Steuerkanäle zur Verfügung stehen.
- Die Ansteuerung vom Ausgang Aux [CH6] der zur Steuerung von Zusatzfunktionen wie Fahrwerk, Beleuchtung o.ä. verwendet werden kann, kann durch Tastendruck übersprungen werden, ohne einen Steuerkanal am Sender zu betätigen.
- Ebenso kann die Zuweisung für den internen Drehzahlregler übersprungen werden, wenn der Drehzahlregler nicht verwendet wird, der Drehzhalregler in einem Elektroheli verwendete wird, oder wenn Motor und Drehzahlregler allein über den Motorkanal kontrolliert werden soll.
- Schließlich kann auch Punkt J (nur zugänglich bei der PROEDITION Firmware) übersprungen werden, wenn die AttitudeControl ("Rettungsfunktion") nicht verwendet werden soll oder nicht über einen separaten Kanal geschaltet werden kann oder soll. Die Funktion steht dann nach wie vor zur Verfügung, wird dann aber entweder über die den Kanal für den Heckkreisel mit kontrolliert, oder kann über die Bankumschaltung fest einprogrammiert werden (nur über StudioX/StudioXm möglich!)
| Menu point | Function |
|---|---|
| B | Pitch |
| C | Roll |
| D | Nick |
| E | Heck |
| F | Heckkreisel Wirkstärke / Bankumschaltung |
| G | Motor [CH5] |
| H | Ausgang Aux [CH6] |
| I | Governor (Verbrenner) |
| J | AttitudeControl Wirkstärke |
Wenn die Status-LED beim Zuweisen rot leuchtet, dann wurden entweder zwei oder mehr Kanäle am Sender betätigt oder das Steuersignal vom Empfänger wurde ganz unterbrochen. Hier bitte nochmals genau die Sendereinstellung bzw. den Servomonitor am Sender prüfen.
Einstellpunkt N - Motor Failsafe
Bei Einstellpunkt N muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall:
- wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist)
- wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird
- wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird.
- wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die Failsafe Position
Hinweis:
- Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren.
- Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.
Bring den Motorkanal an der Fernsteuerung auf die gewünschte Position und drücke einmal kurz auf den Taster. Sollte am Ausgang [CH5] kein Servo oder Motorsteller angesteckt sein, so drücke ebenfalls auf den Taster um das Setup abzuschließen!

Einstellung mit StudioX
Wähle in der StudioX Software oben das Tab "Steuersignale", wenn das MICROBEAST PLUS in der StudioX Software erkannt wurde. Die Einstelloptionen/Einstellpunkte die man hier sieht sind mehr oder weniger identisch zur Einstellung des EMPFÄNGER MENÜs am Gerät. In der ersten Reihe (Menüpunkt A) sieht man, welcher Empfängertyp aktuell gewählt ist. In den Reihen darunter sieht man die aktuelle Funktionsbelegung der Steuerkanäle (falls vorgesehen) und in der untersten Reihe ist die gespeicherte Failsafe Position für den Motorkanal zu sehen.
<img class="ios" src=" ">
">
<img class="ios" src="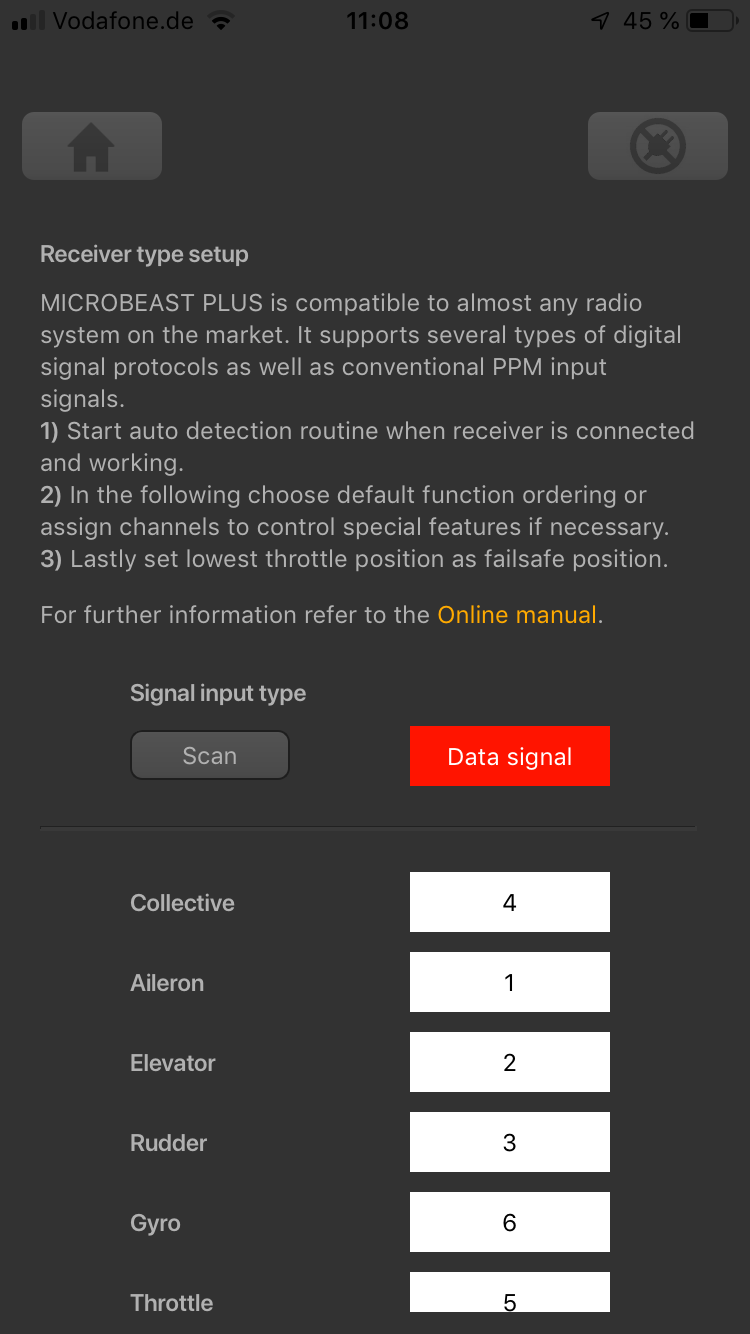 ">
">
Empfängertyp
Damit der angesteckte Empfängertyp erkannt werden kann, muss der Fernsteuersender eingeschaltet und mit dem Empfänger gebunden sein. Stelle auch sicher, dass die Grundeinstellung des Sender wie im Kapitel Fersteuersystem beschrieben durchgeführt wurde. Drücke auf Suchen, um den Scan-Vorgang zu starten. Anhand der Farbe der Status LED sowie in der Display Anzeige sieht man, nach welchem Empfängertyp gerade gesucht wird. Sobald der entsprechende Typ erkannt wurde, öffnet sich eine Abfrage, wie die Funktionsbelegung durchgeführt werden soll, falls ein Summensignal -Empfänger verwendet wird. Wenn ein Standardempfänger verwendet wird, ist soweit alles Notwendige einstellt und das Gerät startet direkt neu.
Falls die Empfängersuche fehlschlägt, wird das System bei Einstellpunkt A bleiben und die Status LED signalisiert mit rotem Blinken, dass kein passender Typ gefunden wurde. Sollte das passieren, überprüfe nochmal ob alles korrekt angeschlossen ist, der Sender korrekt mit dem Empfänger zusammenarbeitet, die Versorgungsspannung ausreichend ist und ob der Empfänger tatsächlich die Steuersignale ausgibt und ob es sich um ein unterstützes Datenformat handelt.
<img class="ios" src="">
<img class="ios" src="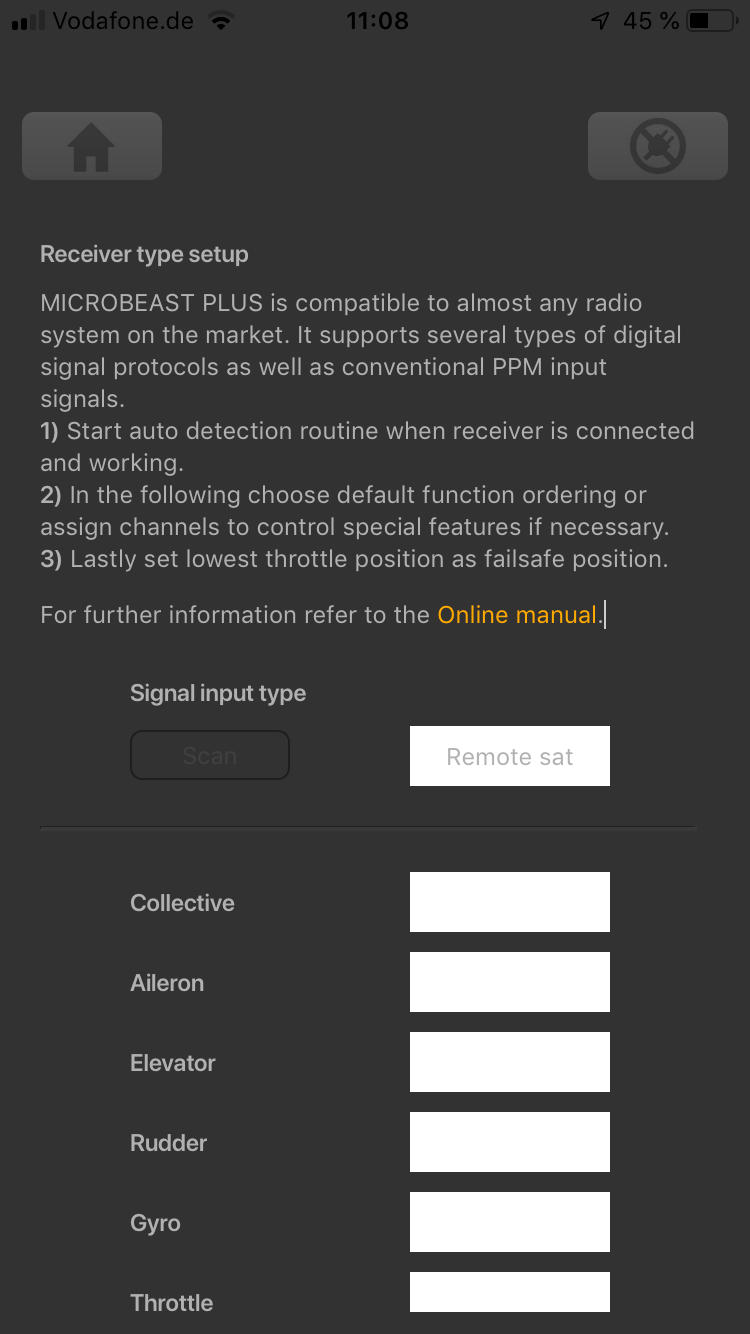 ">
">
<img class="ios" src="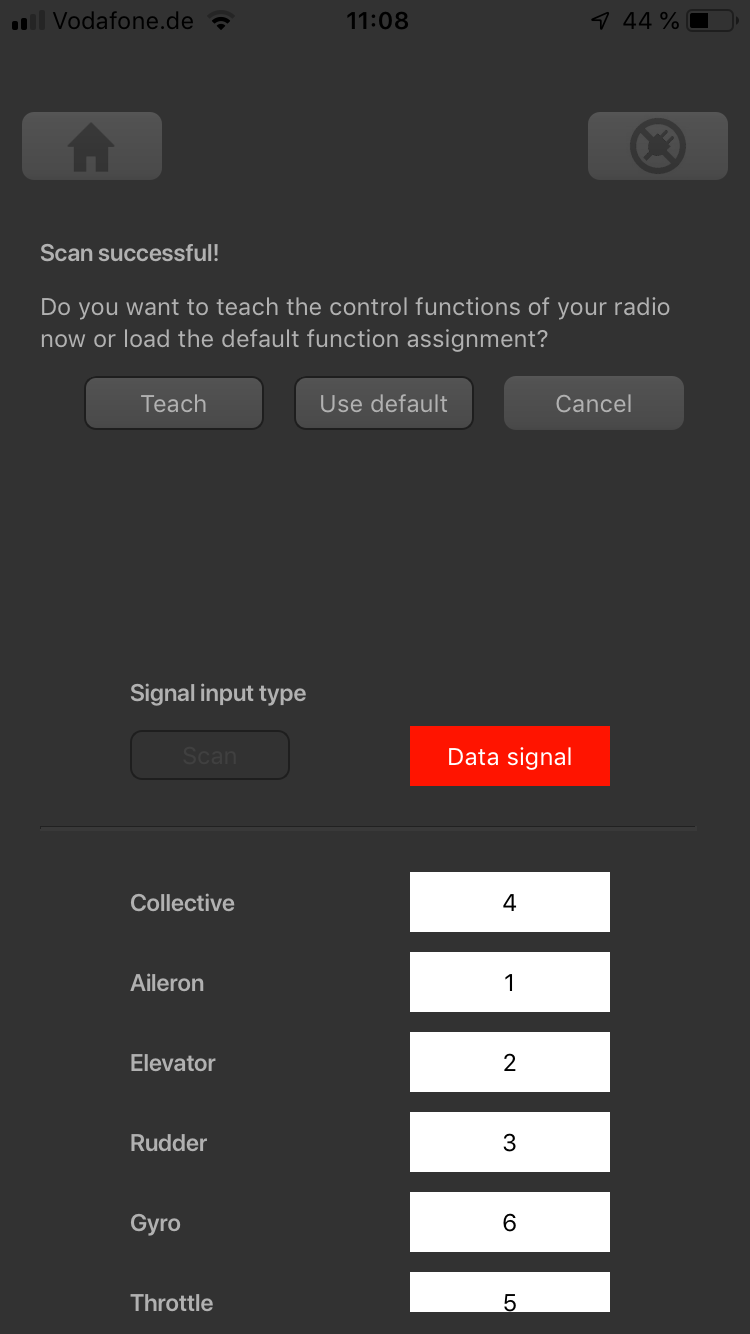 ">
">
Funktionszuordnung
Vorkonfigurierte Funktionsbelegung
Wenn die Belegung des Fernsteuersender zu der Angabe in den oben aufgeführten Tabellen passt, kann auf eine manuelle Zuweisung verzichtet und die Punkte B bis I (J) übersprungen werden. Wähle dazu Voreinstellung im Dialog "Neuer Empfänger erkannt!" Die Funktionsbelegung des Senders ist üblicherweise im Handbuch des Fernsteuersenders abgedruckt oder kann durch Zuhilfenahme des Servomonitors vom Sender herausgefunden werden.
Manuelle Funktionszuweisung
Wenn die Steuerbelegung des Fernsteuersenders nicht der oben vorgegebenen Standardbelegung entspricht, können die einzelnen Steuerkanäle beliebig den einzelnen Steuerfunktionen zugeordnet werden. Dies macht man einfach, indem man die gewünschte Funktion am Sender betätigt, wenn man beim Punkt für die entsprechende Funktion angelangt ist. Die Status LED wird dann kurz in blauer Farbe aufblinken, wenn der Steuerkanal bzw. die Knüppelbewegung erkannt und die Einstellung wird automatisch zum nächsten Punkt springen. Es ist dabei egal, in welche Richtung und wie weit der Kanal betätigt wird. Wichtig ist nur, dass sich immer nur ein Kanal bewegt, andernfalls kann das System nicht erkennen, welcher Kanal nun zugewiesen werden soll. Ein einmal eingelernter Kanal wird im Folgenden übrigens ignoriert. So können z.B. Pitch und Motor durch Bewegen des Pitchknüppels eingelernt werden, indem zuerst beim Punkt "Pitch" der Motorkanal über den Hold - Schalter stillgelegt wird, und dann beim Einlernen der Motorfunktion beim Punkt Gas einfach wieder zugeschaltet wird. Der Pitchkanal wird dann ignoriert, weil er schon für Pitch verwendet wird! Wenn Du soweit bist, starte den Vorgang durch Klick auf die Schaltfläche Einlernen.

|

|

|
Die ersten 6 Funktionen müssen zugewiesen werden, da sie für die grundlegende Flugsteuerung des Modells notwendig sind. Die anderen Funktionen sind nur optional und können ohne Zuweisung übersprungen werden, wenn sie nicht benötigt werden oder nicht ausreichend Steuerkanäle zur Verfügung stehen.
- Die Ansteuerung vom Ausgang Aux [CH6] der zur Steuerung von Zusatzfunktionen wie Fahrwerk, Beleuchtung o.ä. verwendet werden kann, kann durch klick auf Auslassen übersprungen werden, ohne einen Steuerkanal am Sender zu betätigen.
- Ebenso kann die Zuweisung für den internen Drehzahlregler übersprungen werden, wenn der Drehzahlregler nicht verwendet wird, der Drehzhalregler in einem Elektroheli verwendete wird, oder wenn Motor und Drehzahlregler allein über den Motorkanal kontrolliert werden soll.
- Schließlich kann auch die Zuweisung für die AttitudeControl/"Rettungsfunktion" übersprungen werden, wenn sie nicht verwendet werden soll oder nicht über einen separaten Kanal geschaltet werden soll oder kann (nur bei installierter PROEDITION Firmware). Die Funktion steht dann nach wie vor zur Verfügung, wird dann aber entweder über die den Kanal für den Heckkreisel mit kontrolliert, oder kann über die Bankumschaltung fest einprogrammiert werden
<img class="ios" src="">
<img class="ios" src="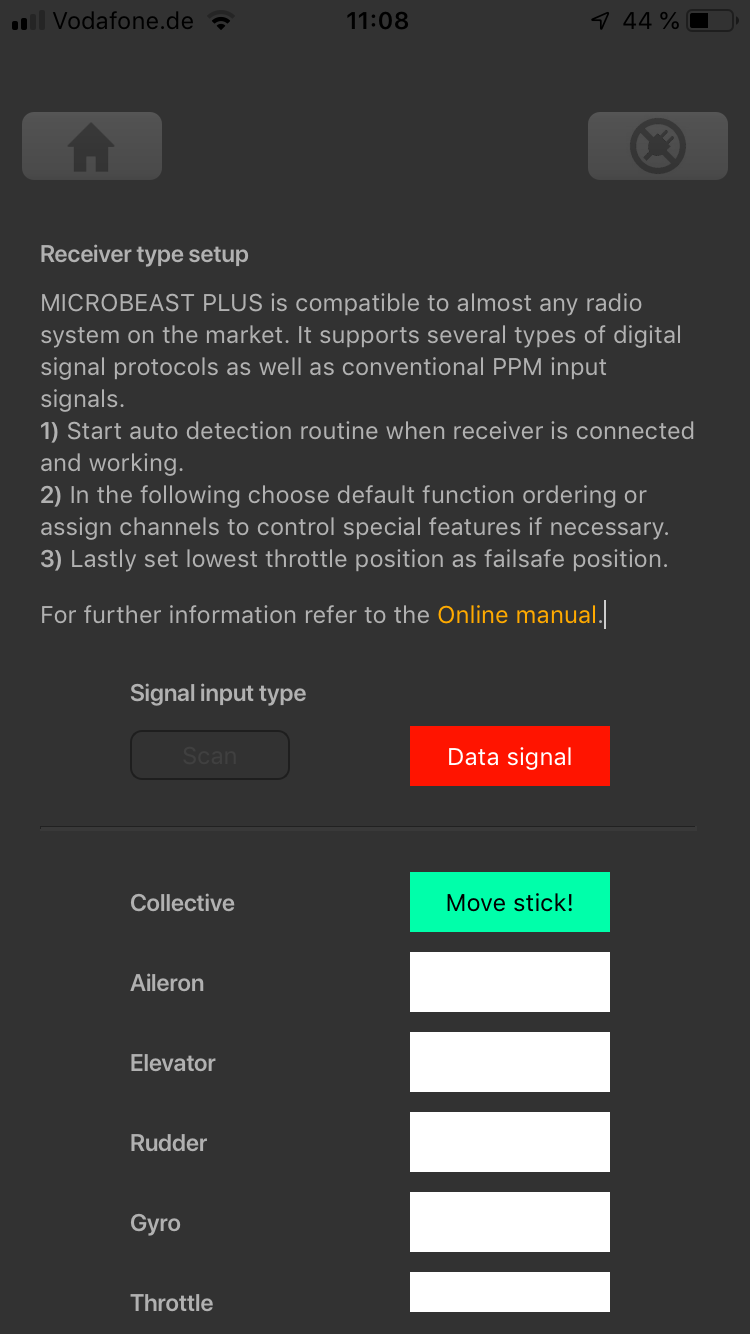 ">
">
<img class="ios" src="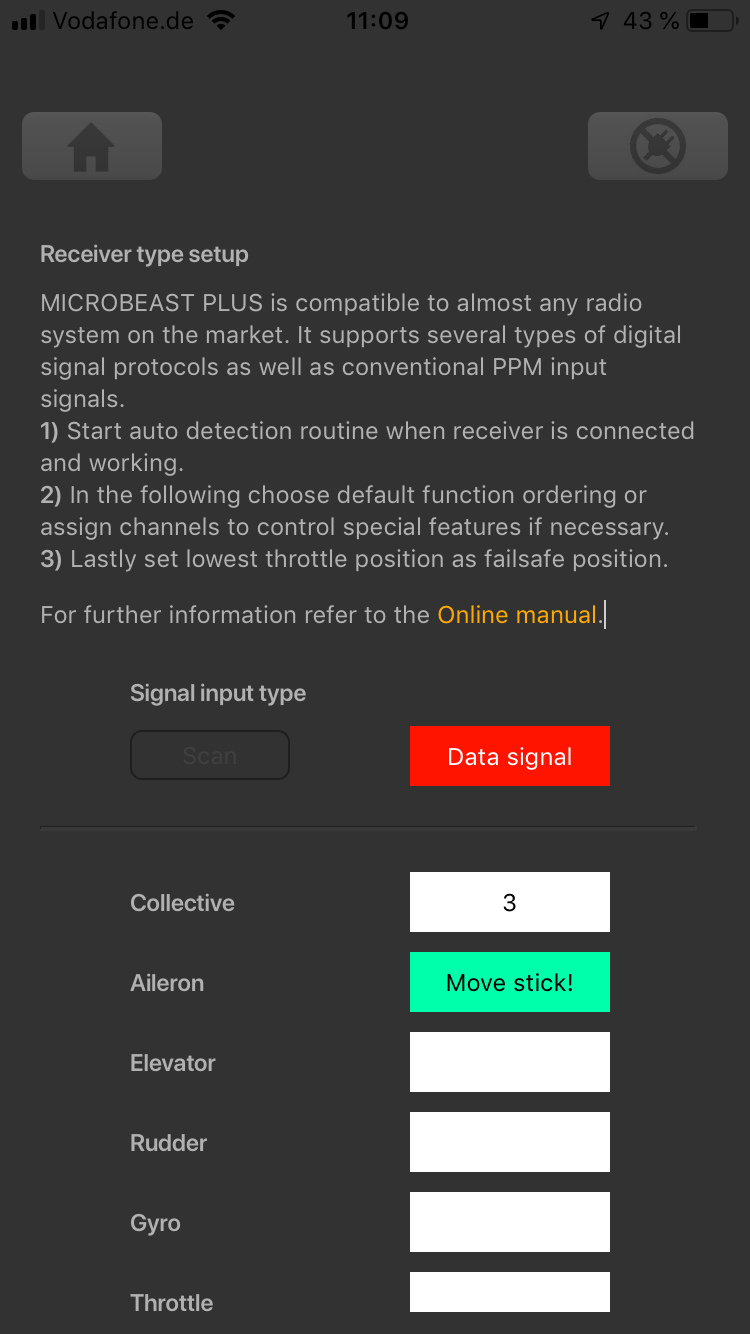 ">
">
<img class="ios" src="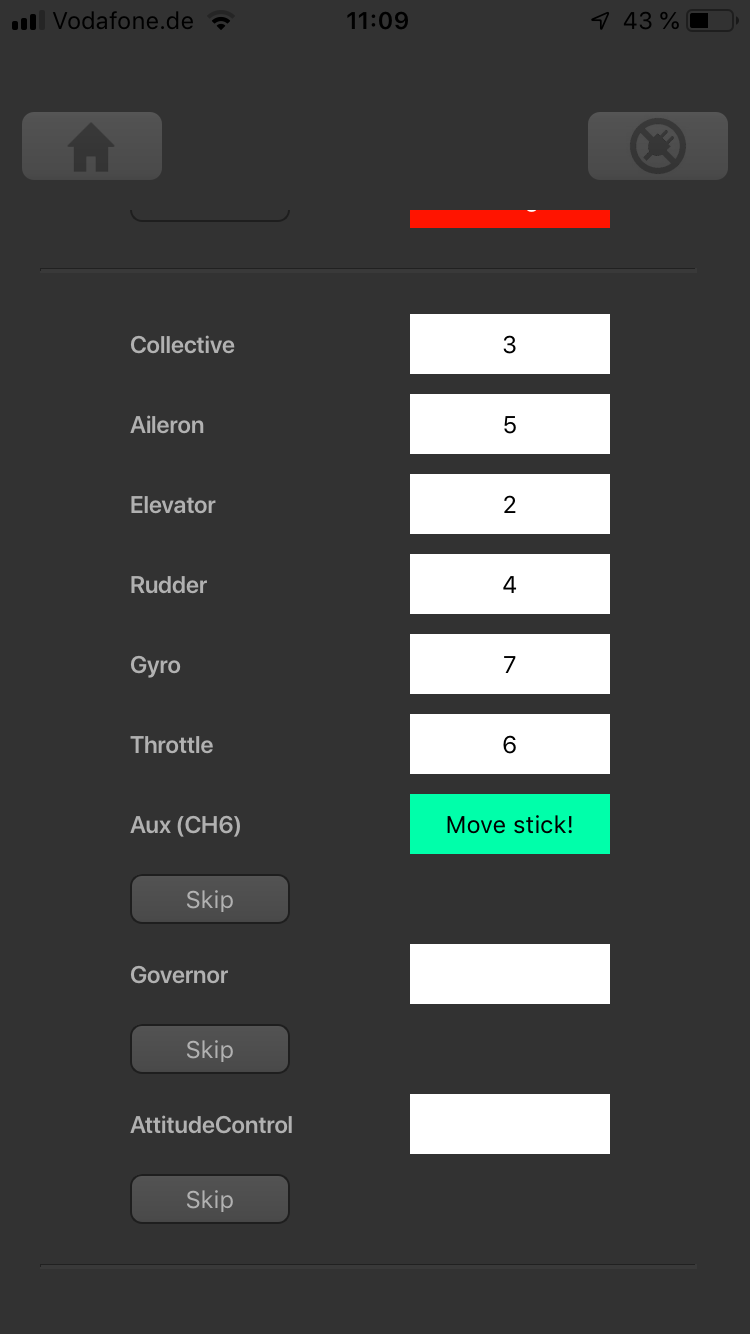 ">
">
<img class="ios" src="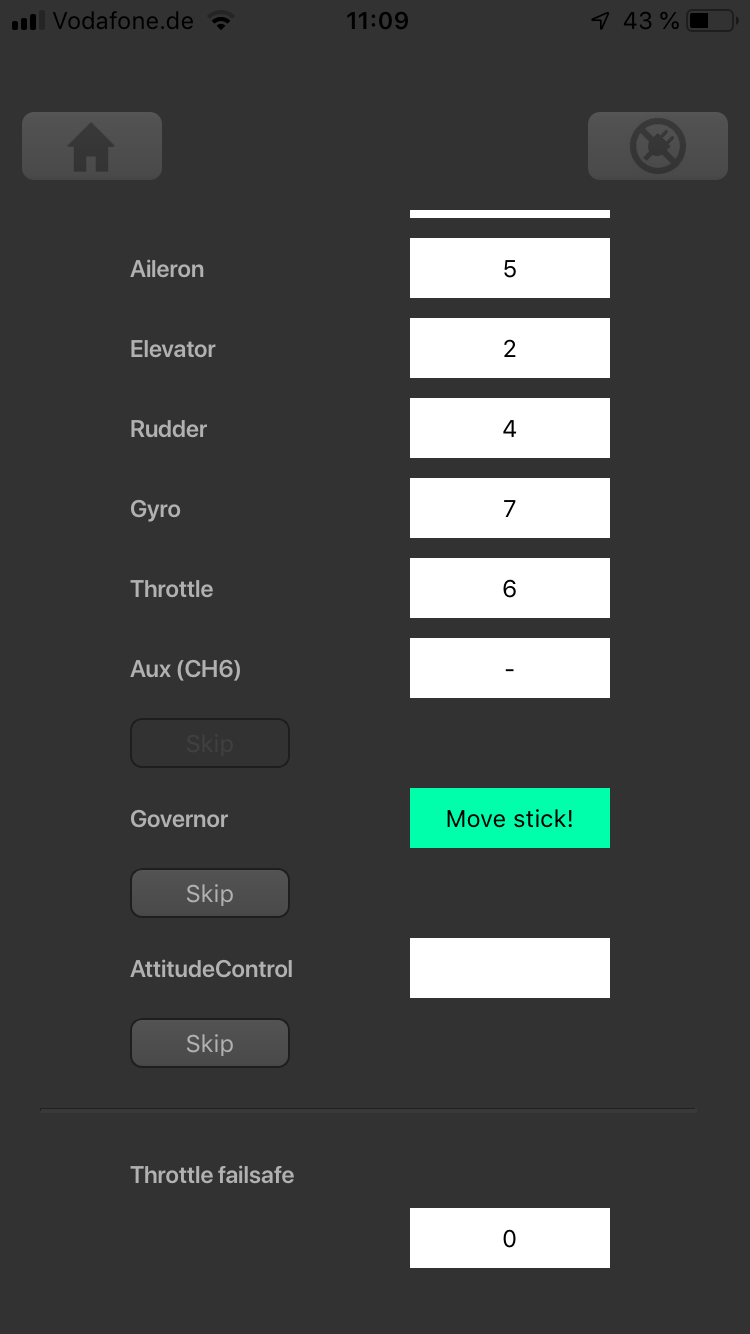 ">
">
Wenn die Status-LED beim Zuweisen rot leuchtet, dann wurden entweder zwei oder mehr Kanäle am Sender betätigt oder das Steuersignal vom Empfänger wurde ganz unterbrochen. Hier bitte nochmals genau die Sendereinstellung bzw. den Servomonitor am Sender prüfen.
Motor Failsafe
Beim untersten Einstellpunkt wird die Failsafe-Position für den Motorkanal hinterlegt. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall:
- wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist)
- wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird
- wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird.
- wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die Failsafe Position
Hinweis:
- Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren.
- Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.
Klicke in der Abfrage "Motor Failsafe Position setzen" auf Fortfahren und bring den Motorkanal an der Fernsteuerung auf die gewünschte Position. Drücke dann auf Speichern um die aktuelle Position zu speichern. Wenn am Ausgang [CH5] kein Servo oder Motorsteller angesteckt ist, wähle einfach Überspringen!
<img class="ios" src="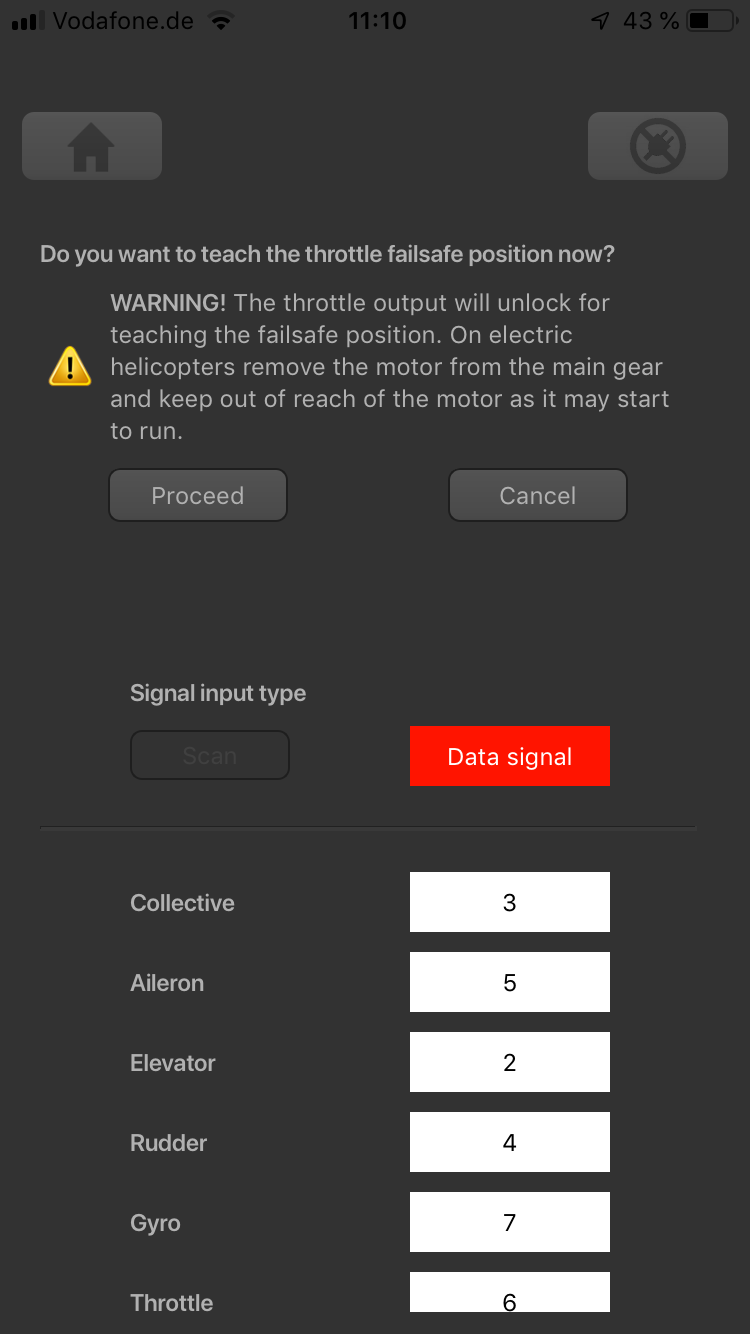 ">
">
<img class="ios" src="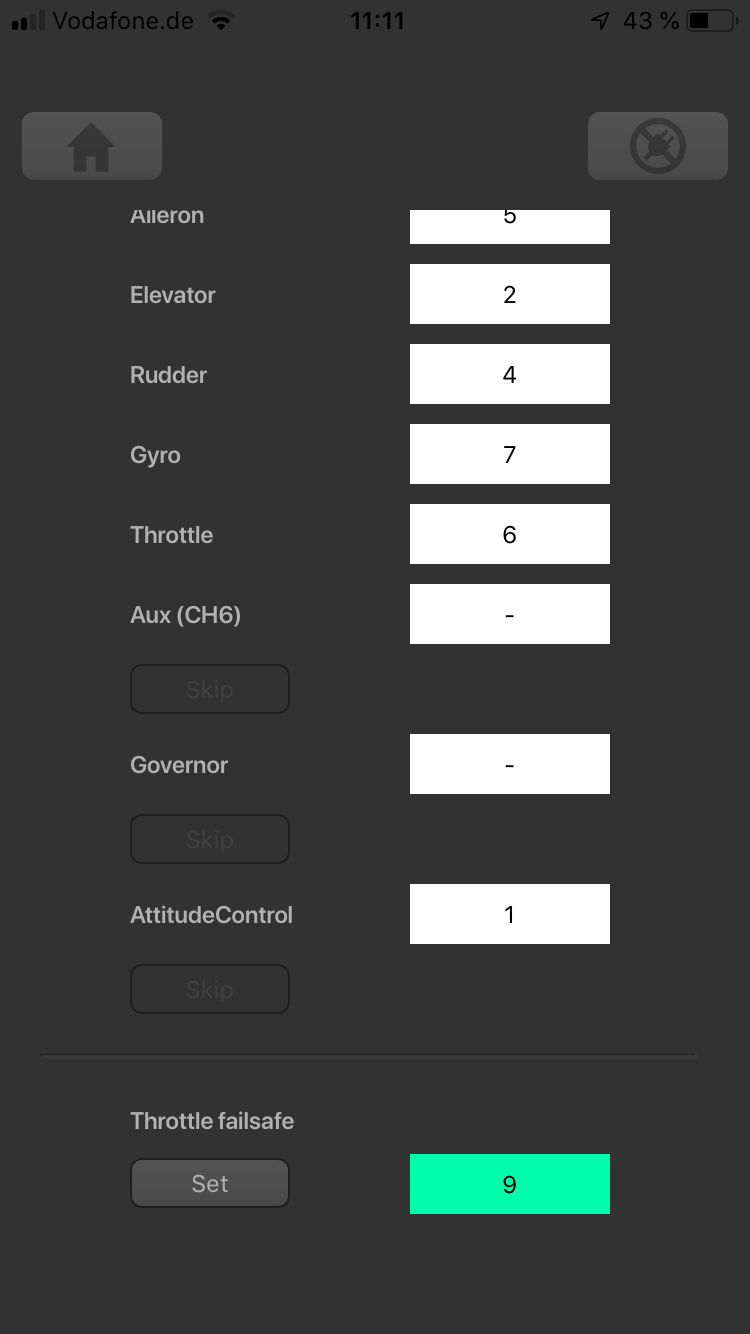 ">
">
<img class="ios" src="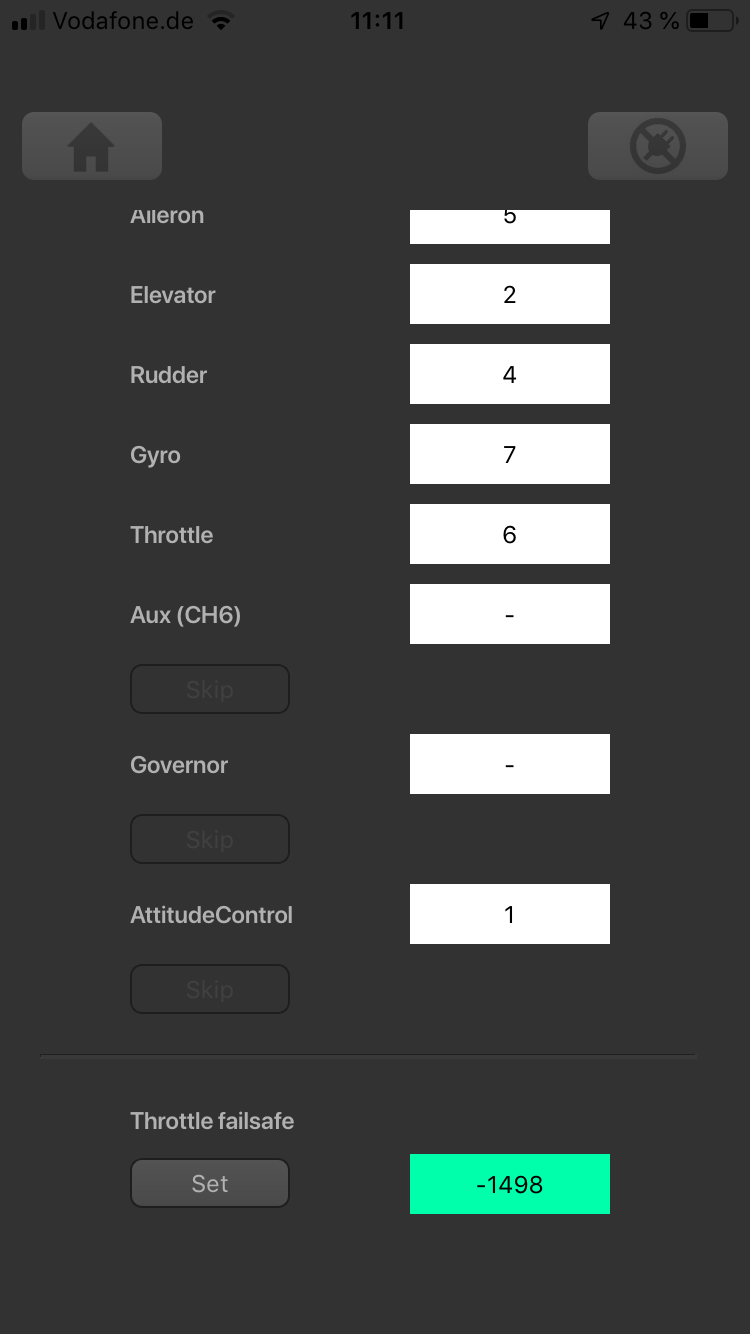 ">
">