Latest revision as of 10:05, 9 March 2023
Information about message (contribute ) This message has no documentation.
If you know where or how this message is used, you can help other translators by adding documentation to this message.
Message definition (Manuals:MBUltraFblV5:Receiver N )
=Setup with StudioX=
=Setup with StudioX=
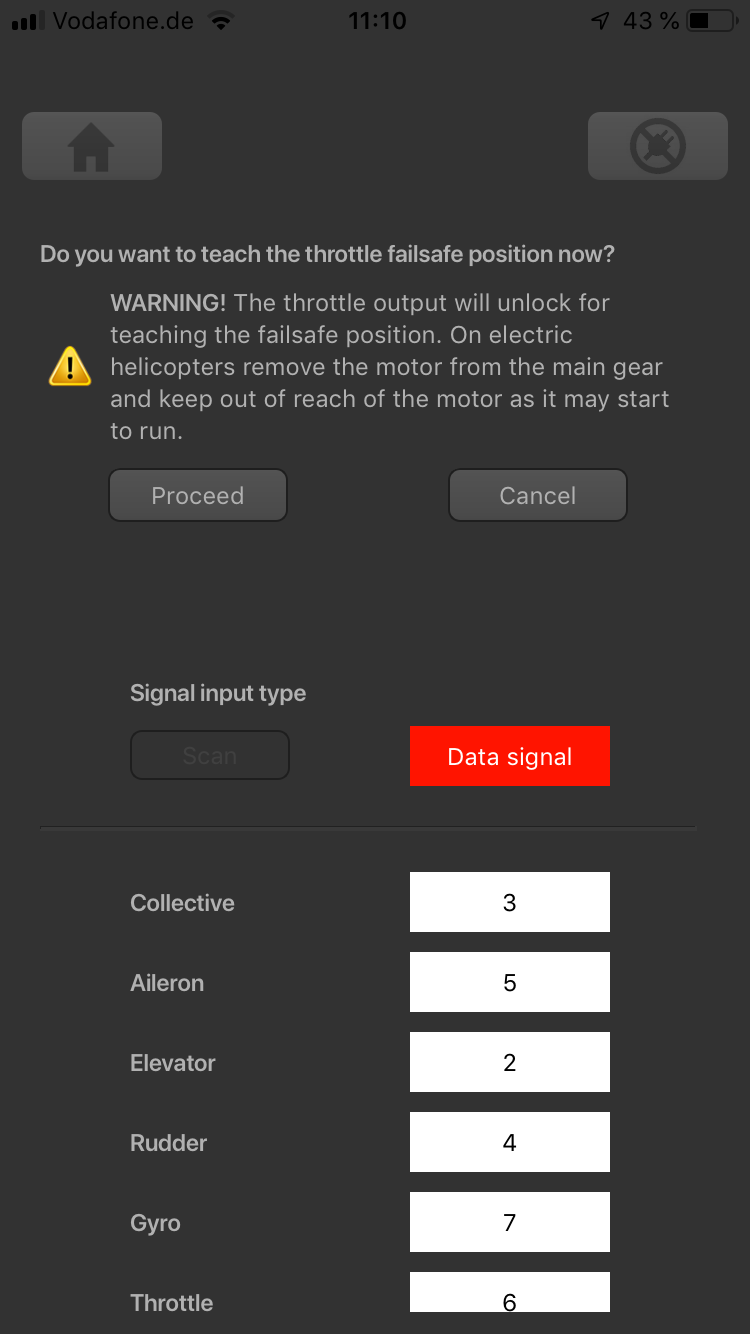
To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press '''Set''' to save the position. If you did not connect a function to [IO2] or [IO1] output and don't need throttle failsafe, press '''Cancel''' to complete setup!<br />
<br />
<div class="iosgallery">
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20025.PNG">
<div class="iostext">After function assignment click <b>Proceed</b> to start teaching the throttle failsafe position</div>
</div>
<div class="iosgallery">
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20027.PNG">
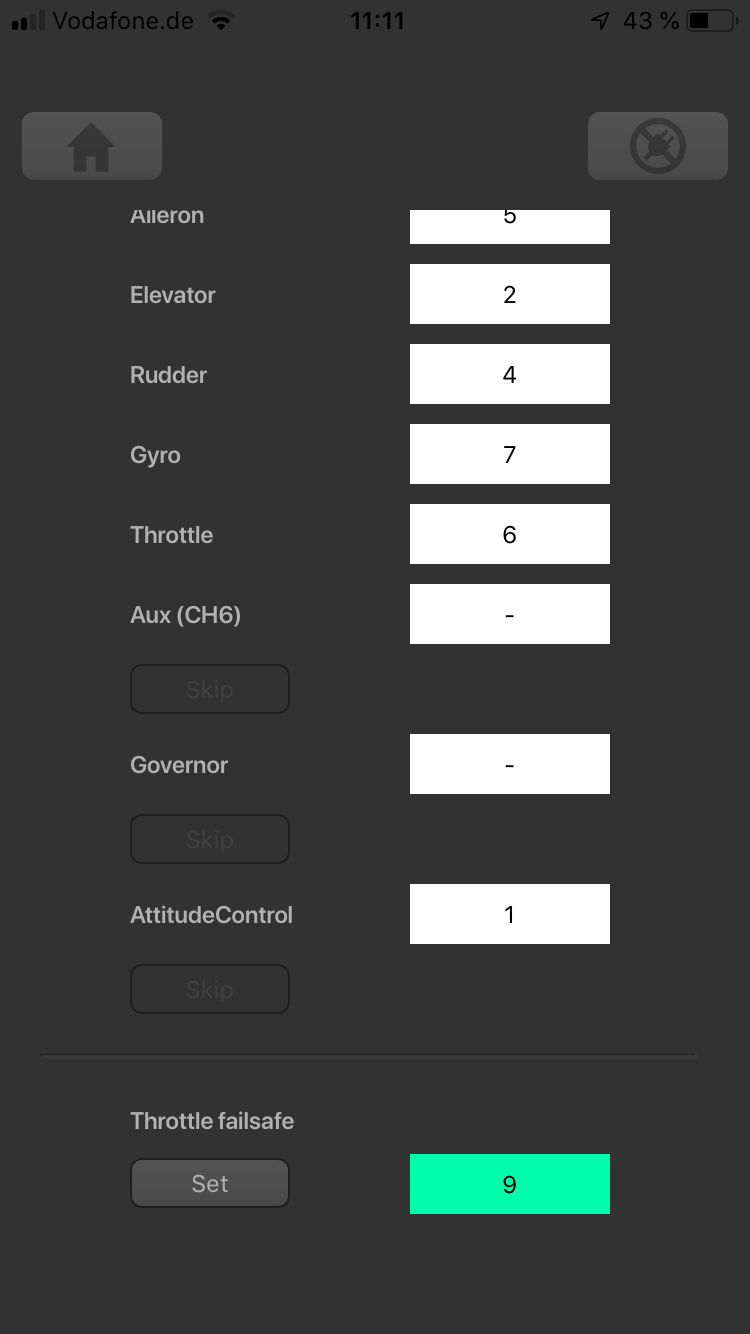
<div class="iostext">Move throttle to lowest position at which the motor is turned off</div>
</div>
<div class="iosgallery">
<img class="ios" src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20028.PNG">
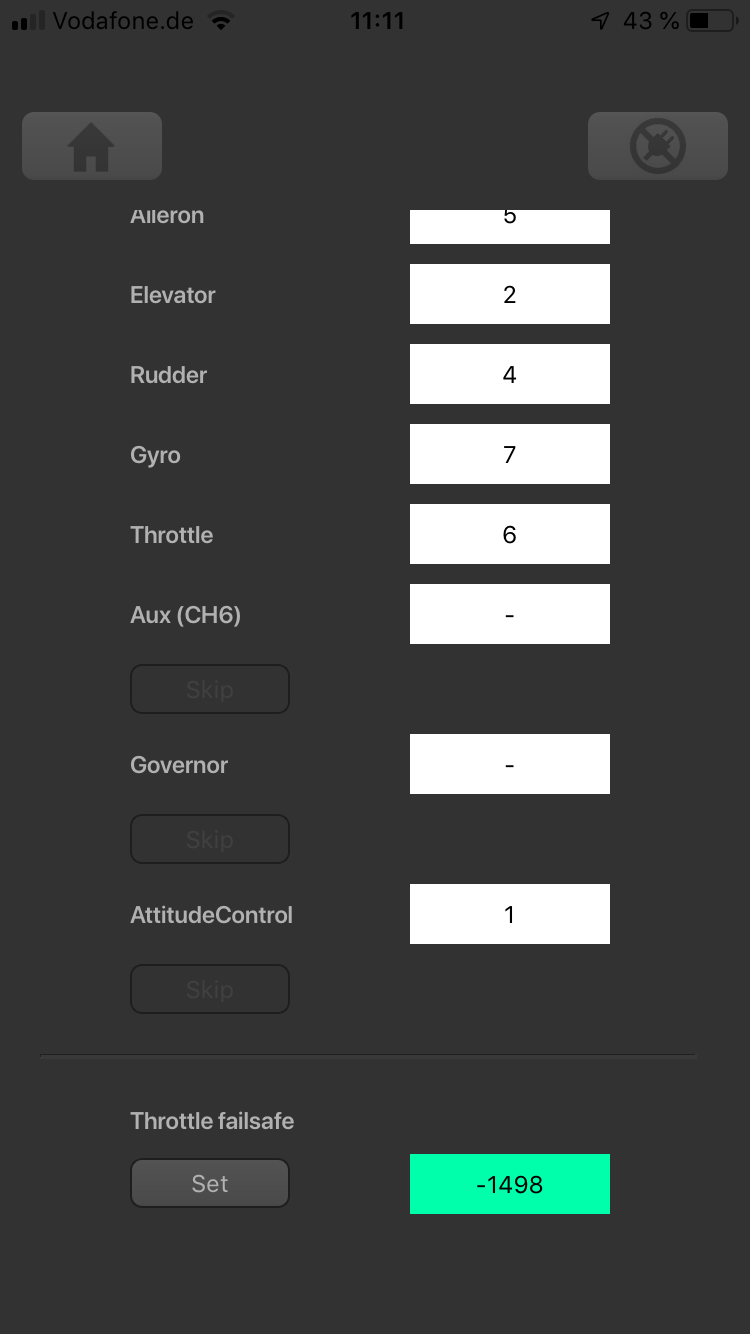
<div class="iostext">Click <b>Set</b> to store the setting</div>
</div>
<br />
<br />
{{WARNING_QUOTE|'''During failsafe setting the [IO2] or [IO1] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function.''' This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident.
}}<br />
<br />
<br /> Translation =Setup with StudioX= Setup with StudioX To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press Set to save the position. If you did not connect a function to [IO2] or [IO1] output and don't need throttle failsafe, press Cancel to complete setup!
After function assignment click Proceed to start teaching the throttle failsafe position
Move throttle to lowest position at which the motor is turned off
Click Set to store the setting
During failsafe setting the [IO2] or [IO1] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function. This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident.
During failsafe setting the [IO2] or [IO1] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function. This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident.