Translations:Manuals:MBUltraFblV5:Receiver N/3/de: Difference between revisions
Jump to navigation
Jump to search
Shornstein (talk | contribs) Created page with "=Einstellung mit StudioX= Klicke in der Abfrage "Motor FailSafe-Position setzen" auf '''Fortfahren''' und bringe den Motorkanal/Gasknüppel an der Fernsteuerung auf die gewün..." |
(No difference)
|
Latest revision as of 10:11, 9 March 2023
Einstellung mit StudioX
Klicke in der Abfrage "Motor FailSafe-Position setzen" auf Fortfahren und bringe den Motorkanal/Gasknüppel an der Fernsteuerung auf die gewünschte Position. Drücke dann auf Speichern um die aktuelle Position zu speichern. Wenn am Ausgang [CH5]/[DI1] kein Servo oder Motorsteller angesteckt ist, wähle einfach Überspringen!
<img class="ios" src="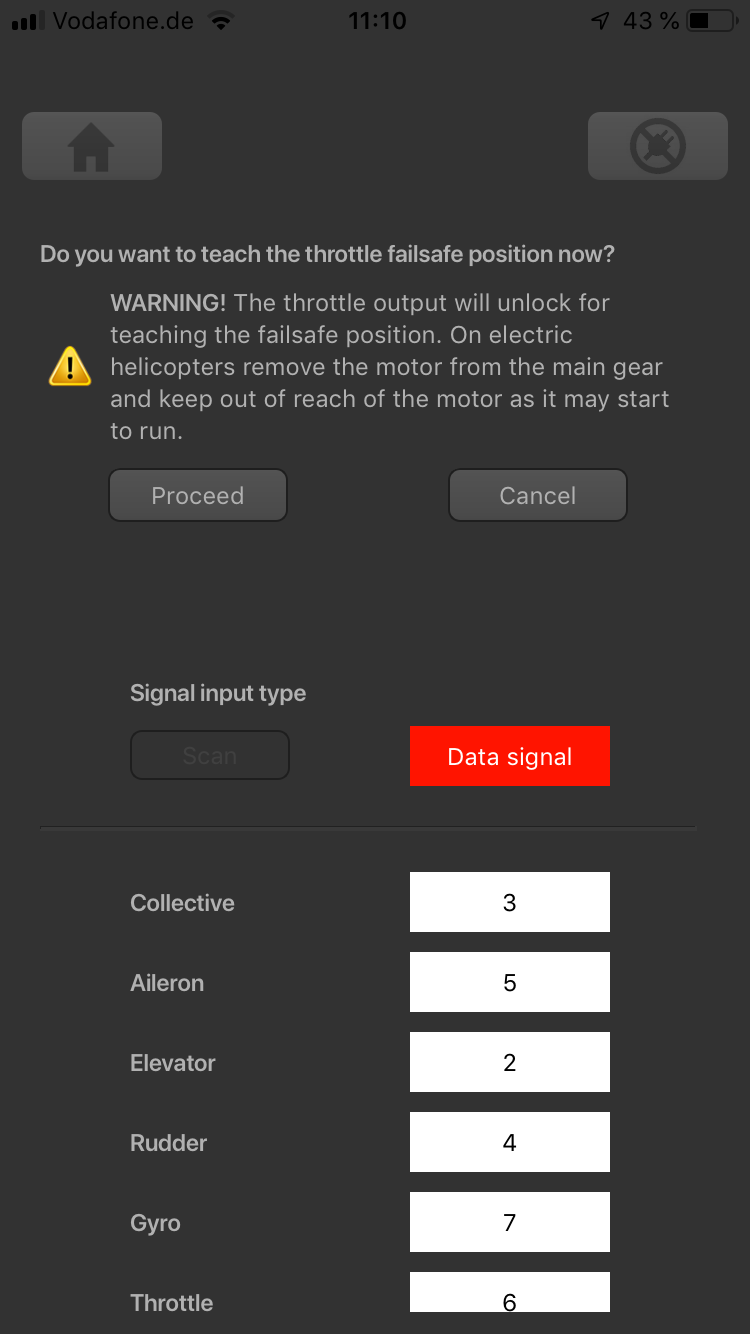 ">
">
Wähle nach der Funktionszuordnung Fortfahren, um mit dem Einlernen der Failsafe Position zu beginnen
<img class="ios" src="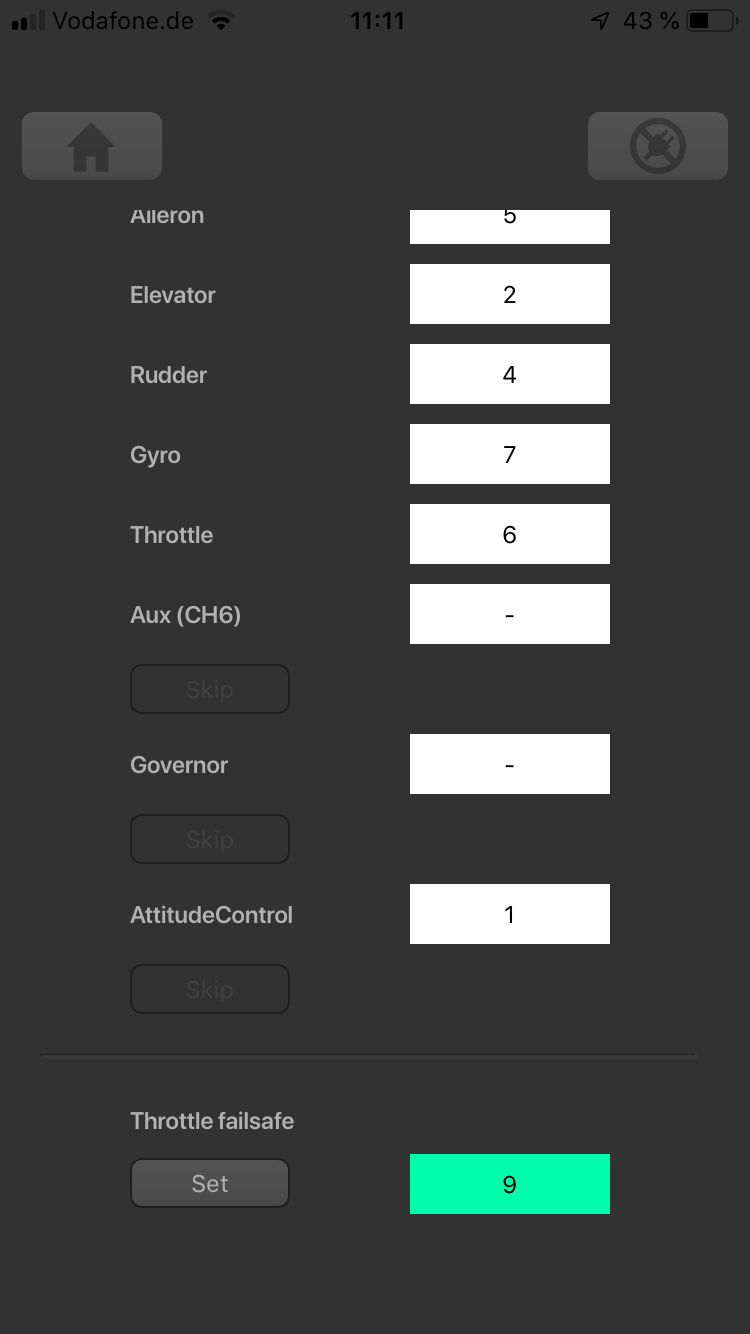 ">
">
Bringe das Gas in die niedrigste Position, in welcher der Motor abgeschaltet ist
<img class="ios" src="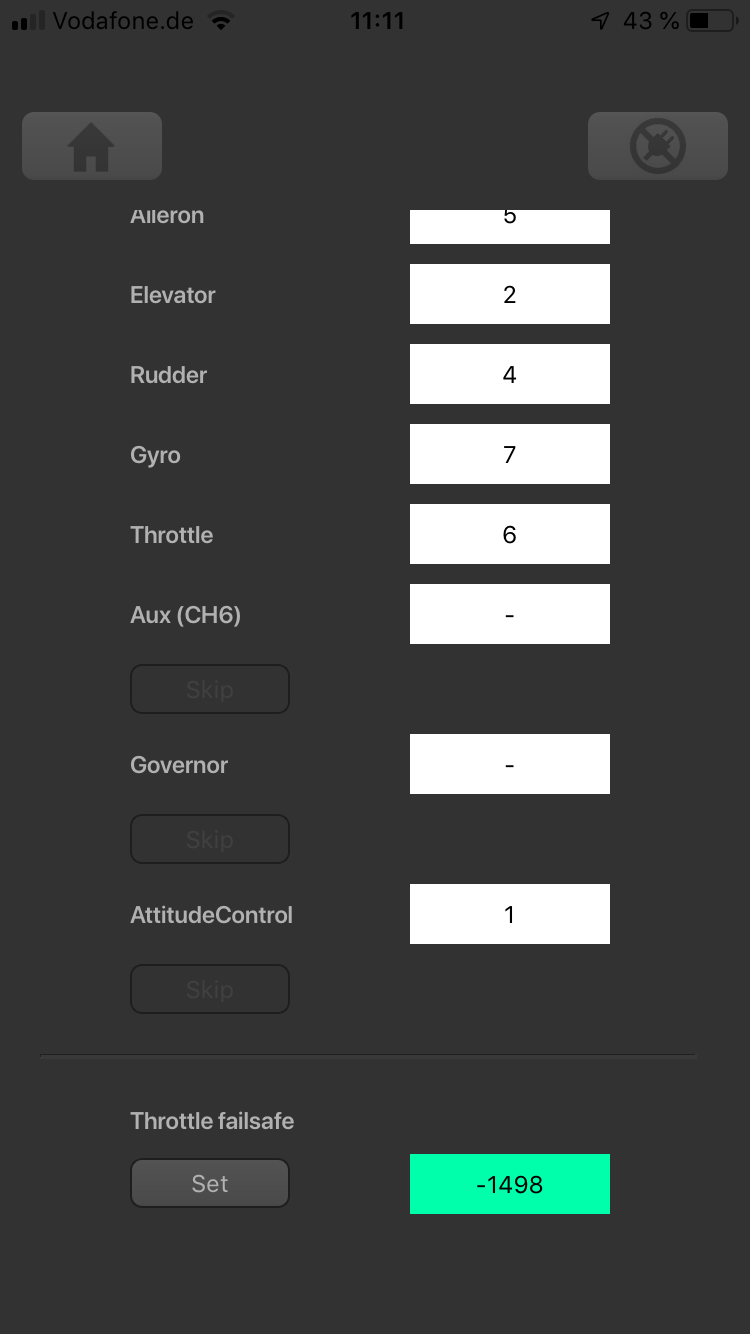 ">
">
Wähle Speichern, um die FailSafe-Position zu speichern
Für die FailSafe-Einstellung ist der Ausgang [IO2] bzw. [IO1] aktiv und reagiert entsprechend auf Bewegungen des Motorkanals, so dass die FailSafe-Position kontrolliert werden kann. Trenne bei einem Elektromodell unbedingt den Motor vom Hauptgetriebe, so dass der Rotor des Helis nicht aus Versehen zu drehen beginnt!