Translations:Manuals:MBUltraFblV5:Setupmenu E/8/de: Difference between revisions
Shornstein (talk | contribs) Created page with "=Einstellung über StudioX App= * Wenn Du den Hecksteuerknüppel voll nach rechts oder links bewegst, sollte die Status LED am MICROBEAST ULTRA dauerhaft leuchten und das Labe..." |
Shornstein (talk | contribs) No edit summary |
||
| Line 12: | Line 12: | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
* Stecke jetzt das Heckservo am Ausgang [CH4] vom MICROBEAST ULTRA an und stelle die Mechanik wie oben beschrieben ein. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. '''Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um.''' Wenn sich das Servo beim Steuern in die richtige Richtung bewegt, ist die interne Steuerrichtung vom MICROBEAST | * Stecke jetzt das Heckservo am Ausgang [CH4] vom MICROBEAST ULTRA an und stelle die Mechanik wie oben beschrieben ein. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. '''Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um.''' Wenn sich das Servo beim Steuern in die richtige Richtung bewegt, ist die interne Steuerrichtung vom MICROBEAST ULTRA zu prüfen und ggf. einzustellen: Wenn der Hecksteuerknüppel nach <span style="color: #4169E1;">'''rechts'''</span>, gesteuert wird, dann muss die Status LED <span style="color: #4169E1;">'''blau'''</span> leuchten und in der Software muss <span style="color: #4169E1;">'''rechts'''</span> angezeigt werden. Wenn der Hecksteuerknüppel nach <span style="color: #DC143C;">'''links'''</span> gesteuert wird, dann muss die Status LED <span style="color: #DC143C;">'''rot'''</span> leuchten und in der Software muss <span style="color: #DC143C;">'''links'''</span> angezeigt werden. '''Wenn diese Anzeige verkehrt herum ist, (also rot = rechts und blau = links) drehe die interne Steuerrichtung durch die Auswahl von "normal" oder "umgedreht" um.'''<br /> | ||
<br /> | <br /> | ||
<div class="iosgallery"> | <div class="iosgallery"> | ||
Latest revision as of 17:43, 28 February 2023
Einstellung über StudioX App
- Wenn Du den Hecksteuerknüppel voll nach rechts oder links bewegst, sollte die Status LED am MICROBEAST ULTRA dauerhaft leuchten und das Label rechts oder links sollte in entsprechender Farbe unterlegt sein. Wenn der Steuerknüppel nicht weit genug ausschlägt, wird die Anzeige "Vergrößern!" erscheinen. In diesem Fall vergrößere den Steuerausschlag/Servoweg im Fernsteuersender für beide Richtungen genau so weit, dass die Status LED gerade von blinkend auf dauerhaft leuchtend wechselt bzw. das Label in der Software entsprechend aufleuchtet und die Meldung verschwindet, wenn der Knüppel die Maximalposition erreicht. Hinweis: Stelle den Servoweg aber nicht zu groß ein. Wenn die LED schon lange vor der Maximalposition leuchtet, reduziere den Ausschlag im Sender entsprechend.
<img class="ios" src=" ">
">
<img class="ios" src="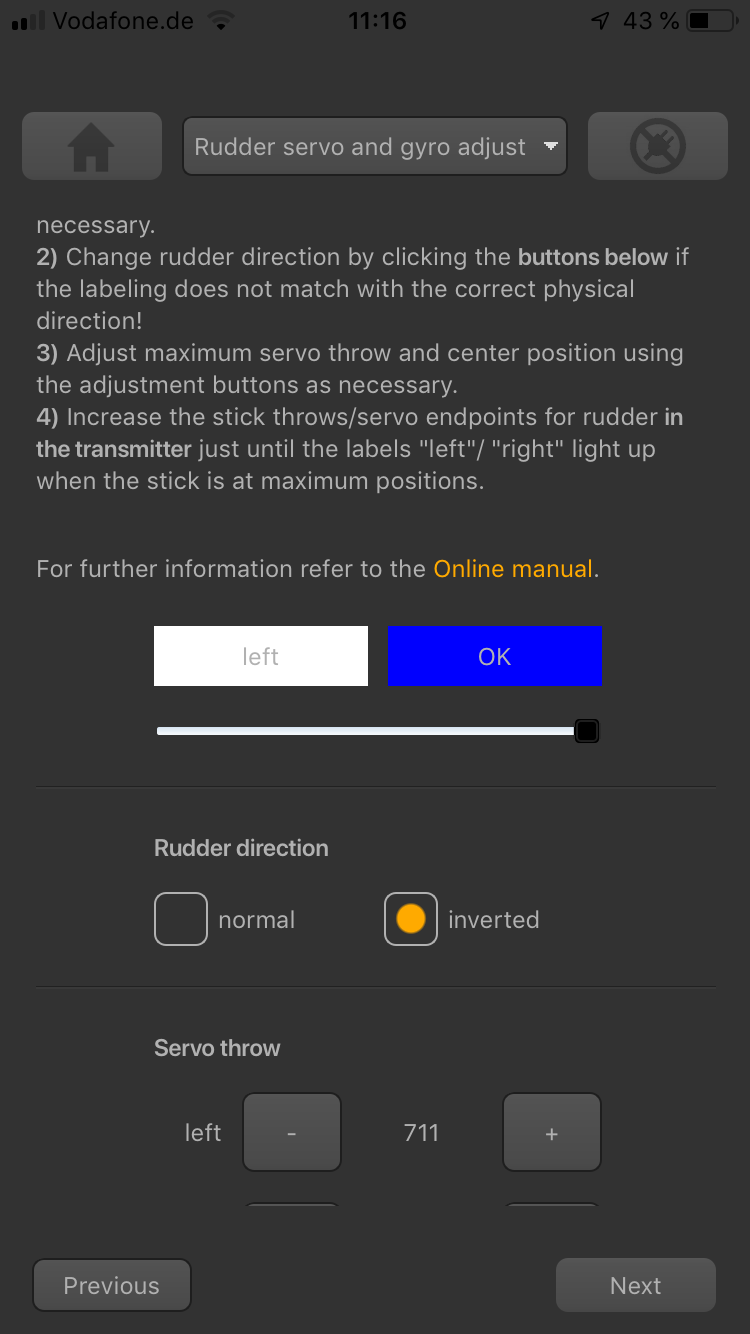 ">
">
- Stecke jetzt das Heckservo am Ausgang [CH4] vom MICROBEAST ULTRA an und stelle die Mechanik wie oben beschrieben ein. Steuere den Heckrotor mit dem Hecksteuerknüppel und prüfe die Steuerrichtung. Wenn der Steuerknüppel das Heck falsch ansteuert, drehe die Servolaufrichtung über die Servoumkehr im Fernsteuersender um. Wenn sich das Servo beim Steuern in die richtige Richtung bewegt, ist die interne Steuerrichtung vom MICROBEAST ULTRA zu prüfen und ggf. einzustellen: Wenn der Hecksteuerknüppel nach rechts, gesteuert wird, dann muss die Status LED blau leuchten und in der Software muss rechts angezeigt werden. Wenn der Hecksteuerknüppel nach links gesteuert wird, dann muss die Status LED rot leuchten und in der Software muss links angezeigt werden. Wenn diese Anzeige verkehrt herum ist, (also rot = rechts und blau = links) drehe die interne Steuerrichtung durch die Auswahl von "normal" oder "umgedreht" um.
<img class="ios" src="">
<img class="ios" src="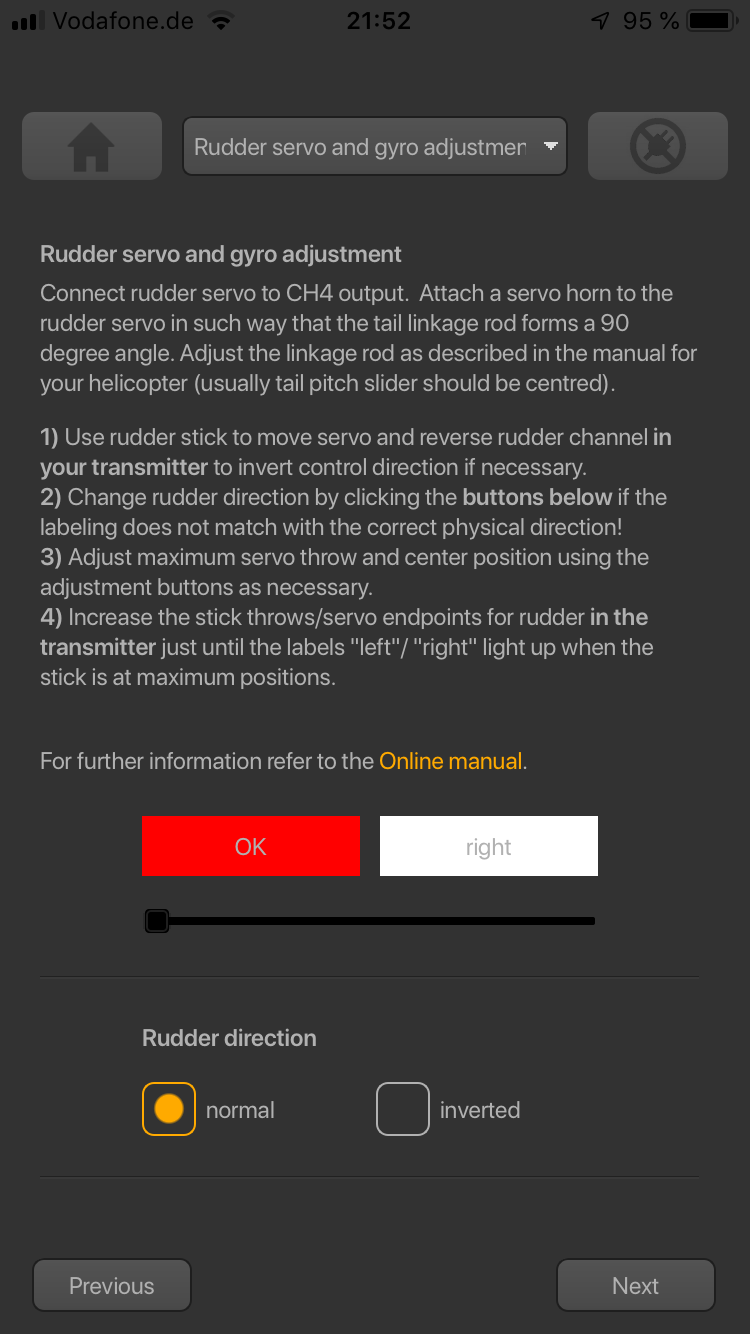 ">
">
- Stelle als letztes die Wegbegrenzung ein. Steuere dazu das Servo vorsichtig an die Endpositionen und reduziere/vergrößere die beiden Werte für rechts und links, so dass die Wegbegrenung optimal eingestellt ist (s.o.).
<img class="ios" src="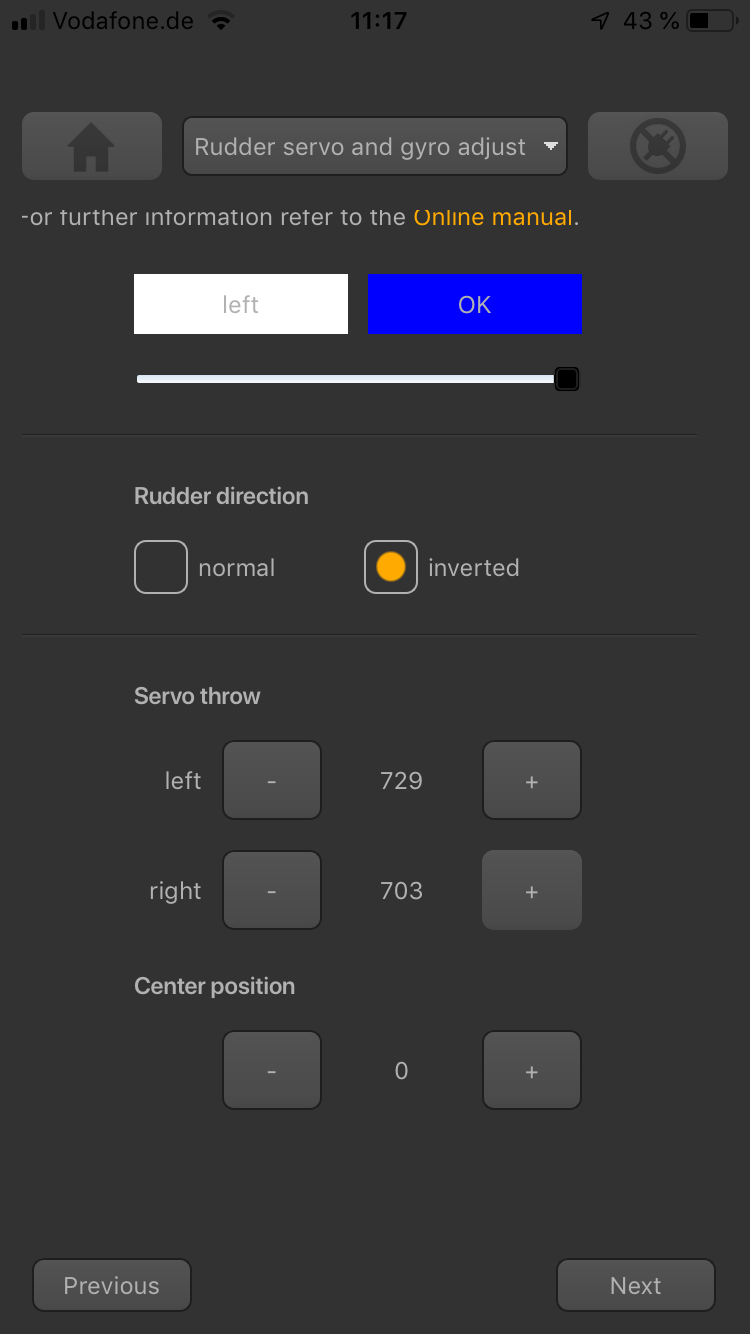 ">
">
Halte unbedingt die vorgegebene Reihenfolge ein! Stelle immer erst die Servolaufrichtung korrekt ein und prüfe dann die Steuerrichtung vom MICROBEAST ULTRA. Die interne Steuerrichtung ändert nicht die Servolaufrichtung! Diese dient nur dazu, dass der Heckkreisel beim Korrigieren der Fluglage das Heck in die richtige Richtung steuert. Gehe beim Prüfen und Einstellen der Steuerrichtungen sehr gewissenhaft vor. Eine falsche Steuerrichtung kann zum Absturz führen!
Zusätzlich kann die Wirkrichtung des Heckkreisels überprüft werden: Wenn der Helikopter von Hand um die Hochachse gedreht wird, muss das System das Heckservo so ansteuern, dass das Heck einen Schub entgegen der Drehung entwickelt. Der Heckkreisel versucht also, die Drehung durch Gegensteuern zu stoppen, genauso als würde der Pilot versuchen, die Drehung abzufangen.