Manuals:MBPlusFblV52:Receiver N/de: Difference between revisions
Shornstein (talk | contribs) Created page with "=Einstellung mit StudioX= Nach der Funktionszuweisung und Telemetrie-Einstellung wirst Du gefragt, ob die Failsafe Position für den Motor eingelernt werden soll. Falls im sp..." |
Updating to match new version of source page |
||
| Line 3: | Line 3: | ||
<br /> | <br /> | ||
<div class="mw-translate-fuzzy"> | |||
=Einstellung am Gerät= | =Einstellung am Gerät= | ||
Bei Einstellpunkt '''N''' muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall: | Bei Einstellpunkt '''N''' muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall: | ||
| Line 22: | Line 23: | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
</div> | |||
=Einstellung mit StudioX= | =Einstellung mit StudioX= | ||
Revision as of 12:09, 9 March 2023
Einstellung am Gerät
Bei Einstellpunkt N muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall:
- wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist)
- wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird
- wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird.
- wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die Failsafe Position
Hinweis:
- Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren.
- Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.
Bringe den Motorkanal an der Fernsteuerung auf die gewünschte Position und drücke einmal kurz auf den Taster. Sollte am Ausgang [CH5] kein Servo oder Motorsteller angesteckt sein, so drücke trotzdem auf den Taster um das Setup abzuschließen!

Für die Failsafeeinstellung ist der Ausgang [CH5] aktiv und reagiert entsprechend auf Bewegungen des Motorkanals, so dass die Failsafeposition kontrolliert werden kann. Trenne bei einem Elektromodell unbedingt den Motor vom Hauptgetriebe, so dass der Rotor des Helis nicht aus Versehen zu Drehen beginnt!
Einstellung mit StudioX
Nach der Funktionszuweisung und Telemetrie-Einstellung wirst Du gefragt, ob die Failsafe Position für den Motor eingelernt werden soll. Falls im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [CH5] automatisch auf diese Position gestellt. Dies ist insbesondere dann der Fall:
- wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Summensignals unterbricht (z.B. bei Verwendung eines einzelnen Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist)
- wenn die Verbindung zwischen Empfänger und MICROBEAST PLUS im Betrieb mechanisch getrennt wird
- wenn der Sender beim Einschalten des MICROBEAST PLUS noch nicht eingeschaltet ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird.
- wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird und die "Motor aus" Position größer ist als die FailSafe Position
Hinweis:
- Die FailSafe-Funktion wird nicht ansprechen, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine FailSafe-Position im Sender oder Empfänger einzuprogrammieren.
- Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor maximal auf "Leerlauf" programmiert werden. Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte FailSafe-Position vorgesehen.
Klicke in der Abfrage "Motor FailSafe-Position setzen" auf Fortfahren und bringe den Motorkanal/Gasknüppel an der Fernsteuerung auf die gewünschte Position. Drücke dann auf Speichern um die aktuelle Position zu speichern. Wenn am Ausgang [CH5]/[DI1] kein Servo oder Motorsteller angesteckt ist, wähle einfach Überspringen!
<img class="ios" src="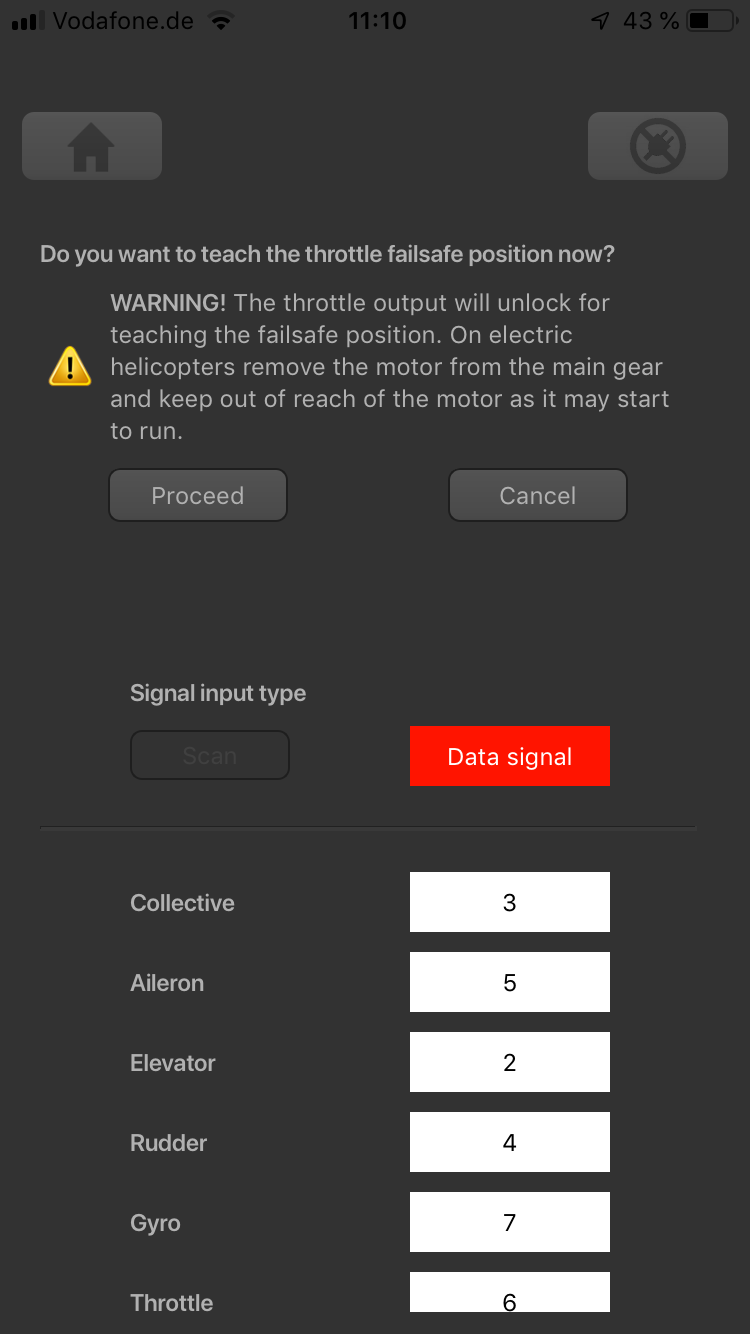 ">
">
<img class="ios" src="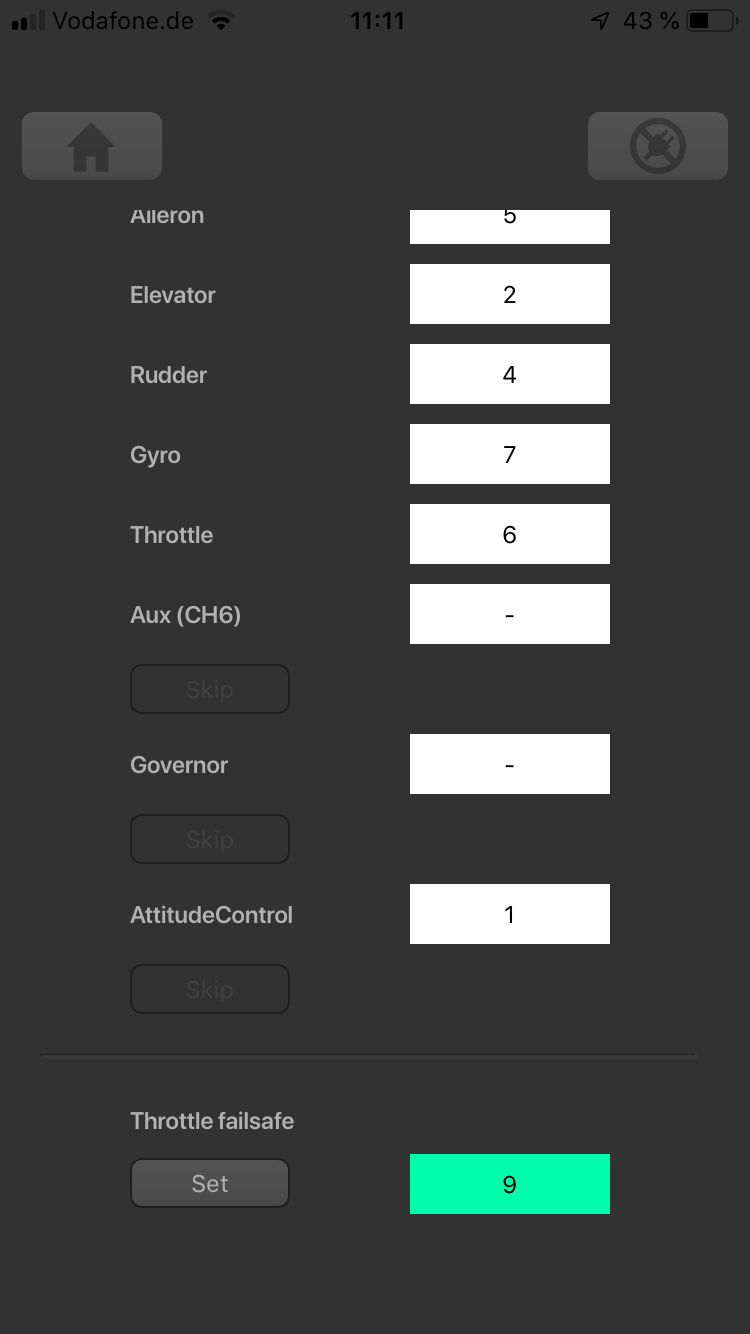 ">
">
<img class="ios" src="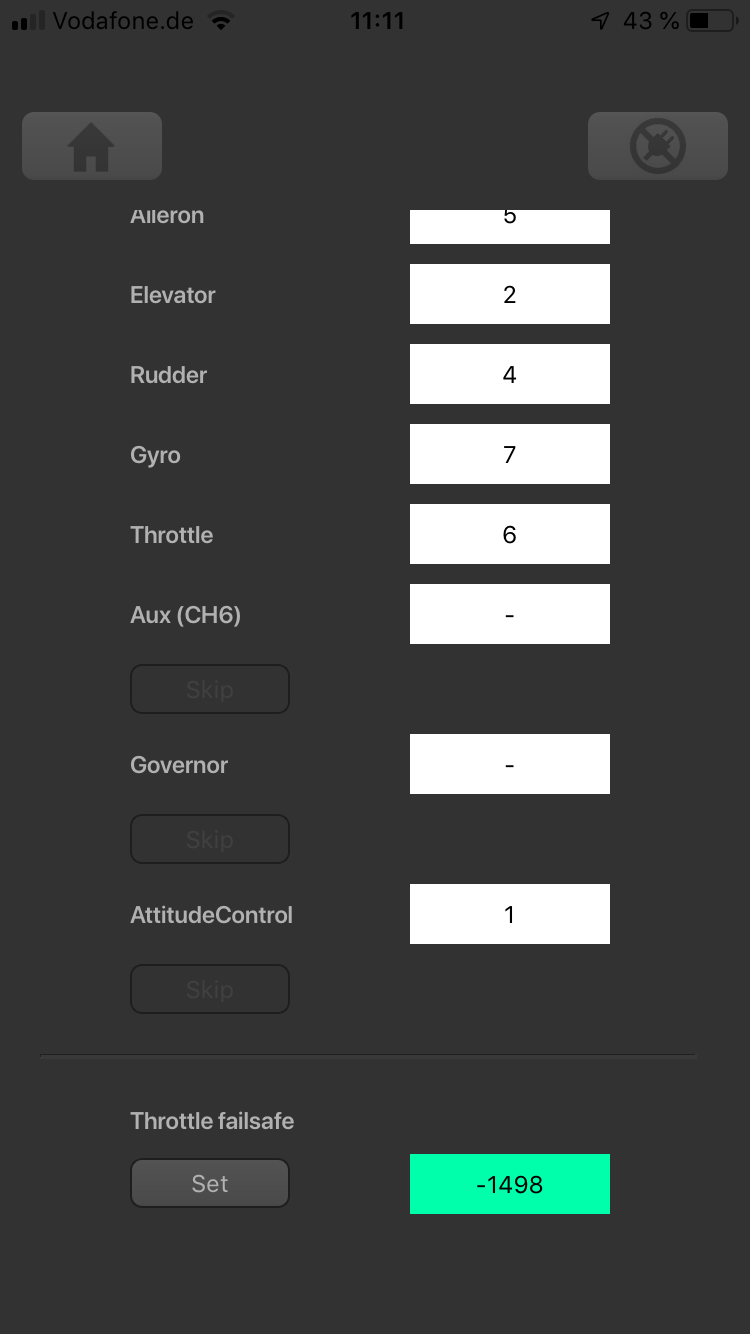 ">
">