Difference between revisions of "Help:AttitudeControl/de"
Shornstein (talk | contribs) |
(Updating to match new version of source page) |
||
| Line 25: | Line 25: | ||
Einstellung des Schaltkanals für die AttitudeControl auf jeden Fall nochmals Parametermenü Einstellpunkt M | Einstellung des Schaltkanals für die AttitudeControl auf jeden Fall nochmals Parametermenü Einstellpunkt M | ||
aufrufen und dort den gewünschten AttitudeControl Modus auswählen. | aufrufen und dort den gewünschten AttitudeControl Modus auswählen. | ||
| + | |||
| + | ===Using the tail gyro gain to activate AttitudeControl, how can I control AttitudeControl and switch the tail gyro gain with flight mode switch?=== | ||
| + | If applicable you may use the free programmable mixing functions of your transmitter to mix your AttitudeControl switch on the tail gyro gain output. To enable AttitudeControl you must reverse the sign of the tail gyro gain channel. So by flipping the AttitudeControl switch you must subtract or add enough channel output so that the gyro gain channel will give the amount of desired AttitudeControl gain. In the following example it is shown how this may work out on a Spektrum DX18.<br /> | ||
| + | <br /> | ||
| + | <gallery mode="nolines"> | ||
| + | Image:AttitudeControl_Spektrum_1.JPG|Create a new programable mixer | ||
| + | Image:AttitudeControl_Spektrum_2.JPG|Here we just use a very simple mixer | ||
| + | Image:AttitudeControl_Spektrum_3.JPG|The gyro channel (GYR) is set to 50% at the moment | ||
| + | Image:AttitudeControl_Spektrum_4.JPG|When flipping the switch it becomes -50% | ||
| + | </gallery> | ||
| + | We use a mixer from switch E to the GYR channel that subtracts 100% when flipping the switch. As the gyro gain may differ between different flight modes you can create one mixer for each flight mode. Each mixer subtracts as much as necessary to get always the same amount of AttitudeControl gain (in our example -50%). | ||
| + | <gallery mode="nolines"> | ||
| + | Image:AttitudeControl_Spektrum_5.JPG|Mix1 subtracts 100% to get 50 - 100 = -50% in flight mode 1 | ||
| + | Image:AttitudeControl_Spektrum_7.JPG|In flight mode 2 gyro gain is 58% | ||
| + | Image:AttitudeControl_Spektrum_6.JPG|By using Mix2 we 108% to get 58 - 108 = -50% in flight mode 2 | ||
| + | </gallery> | ||
| + | |||
<br /> | <br /> | ||
Revision as of 19:12, 15 May 2015
Woher bekomme ich die MICROBEAST PLUS ProEdition Zusatzanleitung?
StudioX V2 bietet die Möglichkeit sämtliche Anleitungen anzuzeigen, die für Ihr BEASTX Gerät relevant sind. Somit können wir Sie automatisch immer mit den aktuellsten Anleitungen versorgen. Um die verfügbaren Anleitungen sehen zu können müssen Sie Ihr BEASTX Gerät an den Computer anschließen und sich über StudioX im freakware Network einloggen. Alle Anleitungen erscheinen dann auf der Startseite zum Download:

StudioX in der Version 2 können Sie hier herunterladen: StudioX 2.0 zur Voransicht
Wie bekomme ich das Upgrade auf Version 4.x.x. ProEdition mit Drehzahlregler und Rettungsfunktion (AttitudeControl)?
Um das Upgrade für Ihr MICROBEAST PLUS herunterladen zu können benötigen Sie die aktuelle Version 2.0 von StudioX. Mit dieser können Sie sich im freakware Network einloggen und Ihr MICROBEAST PLUS registrieren. StudioX Version 2 bekommen Sie hier: StudioX 2.0 zur Voransicht
Bitte beachten Sie, dass es sich bei der Version 4.x.x ProEdition um ein Upgrade handelt, nicht um ein Update. Das bedeutet, dass das Gerät im Funktionsumfang erweitert wird und deshalb das Upgrade kostenpflichtig ist. Reguläre Updates bleiben hingegen auch weiterhin für sämtliche Geräte kostenlos.
Nach dem Update von Version 3.x.x auf Version 4.x.x. geht das Pitch nur noch in eine Richtung
Muss ich jetzt einen Werksreset machen und alles neu einstellen?
Da Version 4.x.x die Möglichkeit einer pitchgesteuerten Rettungsfunktion bietet, müssen die Richtungen des Pitchsteuerknüppels eingelernt werden. Da dieser Parameter in den Vorgängerversionen noch nicht vorgesehen war, muss nach dem Update unbedingt das kollektive Pitch bei Setupmenü Einstellpunkt K neu eingestellt werden. Wenn Sie das nicht machen, fehlen einige wichtige Werte im Gerät und daher funktioniert das Pitch nach dem Update nicht korrekt. Bitte lesen Sie die ProEdition Zusatzanleitung sehr sorgfältig. Es gibt noch weitere neue Parameter, die nach dem Update unbedingt eingestellt werden müssen. Bei MICROBEAST PLUS wurde extra darauf geachtet, dass die bisherigen Einstellungen durch Updates nicht verloren gehen und das System nach einem Update nicht von Grund auf neu eingestellt werden muss. Neue oder funktional veränderte Parameter müssen jedoch unbedingt nach einem Update kontrolliert und eingestellt werden.
Die Rettungsfunktion (AttitudeControl) lässt sich nicht über den Sender einschalten, obwohl ich bei Parametermenü Einstellpunkt M einen der angebotenen Modi angewählt habe
Bei Verwendung eines Singleline Empfängers ist es unbedingt notwendig, dass sie wenigstens einmal im Empfänger Einstellmenü den Schaltkanal für die AttitudeControl zuweisen, entweder indem Sie den gewünschten Schalter bei Empfängermenü Einstellpunkt J betätigen oder die entsprechende Standardbelegung laden, oder indem Sie Einstellpunkt J überspringen um den Kanal der Heckkeiselempfindlichkeit auch für die AttitudeControl zu verwenden.
Auch wenn Sie einen Standardempfänger verwenden müssen Sie das Empfänger Einstellmenü aufrufen und die Auswahl des Standardempfängers durch Tastendruck bestätigen. Nur so wird die spezielle Kanalzuweisung Heckkreiselempfindlichkeit<->AttitudeControl gesetzt und abgespeichert.
Bitte denken Sie daran, dass aus Sicherheitsgründen die AttitudeControl und die Drehzahlreglerfunktion deaktiviert werden, wenn die Einstellung im Empfängermenü neu durchgeführt wurde. Sie müssen also nach der Einstellung des Schaltkanals für die AttitudeControl auf jeden Fall nochmals Parametermenü Einstellpunkt M aufrufen und dort den gewünschten AttitudeControl Modus auswählen.
Using the tail gyro gain to activate AttitudeControl, how can I control AttitudeControl and switch the tail gyro gain with flight mode switch?
If applicable you may use the free programmable mixing functions of your transmitter to mix your AttitudeControl switch on the tail gyro gain output. To enable AttitudeControl you must reverse the sign of the tail gyro gain channel. So by flipping the AttitudeControl switch you must subtract or add enough channel output so that the gyro gain channel will give the amount of desired AttitudeControl gain. In the following example it is shown how this may work out on a Spektrum DX18.
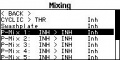
Create a new programable mixer
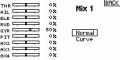
Here we just use a very simple mixer
The gyro channel (GYR) is set to 50% at the moment
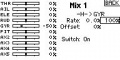
When flipping the switch it becomes -50%




We use a mixer from switch E to the GYR channel that subtracts 100% when flipping the switch. As the gyro gain may differ between different flight modes you can create one mixer for each flight mode. Each mixer subtracts as much as necessary to get always the same amount of AttitudeControl gain (in our example -50%).
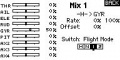
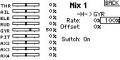
Mix1 subtracts 100% to get 50 - 100 = -50% in flight mode 1

In flight mode 2 gyro gain is 58%
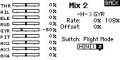
By using Mix2 we 108% to get 58 - 108 = -50% in flight mode 2



Die AttitudeControl bringt meinen Helikopter nicht in eine perfekt horizontale Lage
Beim Funktionstest am Boden scheint alles wie erwartet zu funktionieren und selbst beim ersten Test in der Luft wird der Heli in Schwebeposition gehalten. Allerdings steht der Heli nach einiger Flugzeit in (extremer) Schräglage, sobald die AttitudeControl zugeschaltet wird.
Die MICROBEAST PLUS AttitudeControl verwendet die Informationen der Gyro- und Beschleunigungssensoren um die Lage des Helikopters im Raum zu bestimmen und um den künstlichen Horizont aufrecht zu erhalten. Dieser künstliche Horizont hängt also davon ab, wie präzise die Daten durch die Sensoren erfasst werden und wie gut die tatsächliche Fluglage des Helis dadurch abgebildet wird. Wenn die Sensoren schlechte oder falsche Messwerte liefern, so hat das direkten Einfluss auf die Leistung der AttitudeControl. In erster Linie werden die Sensordaten durch Erschütterungen und Vibrationen verfälscht oder gestört. Zwar sind die Gyrosensoren zur Drehratenerfassung generell sehr resistent gegenüber typischen Vibrationen die in Modellhelis auftreten und man kann die Auswirkungen von Vibrationen im normalen Flugbetrieb oft nicht erkennen. Aber es reichen schon geringste Einflüsse und Abweichungen auf den Sensoren, um den künstlichen Horizont zu verfälschen, der sich aus der Summe der Daten über die Zeit ergibt. Darüberhinaus sind die Beschleunigungssensoren, welche zusätzlich für die Lagebestimmung herangezogen werden, prinzipbedingt sehr anfällig für sämtliche Erschütterungen. Werden diese Sensoren gestört, fällt ein wesentlicher Bestandteil der Lageregelung weg. Sollte die AttitudeControl den Heli (vor allem schon nach sehr kurzer Flugzeit) nicht gerade ausrichten, sondern der Heli bei aktiver AttitudeControl stark zu eine Seite wegkippen, so prüfen Sie daher bitte unbedingt, ob der Heli sauber und frei von Vibrationen läuft. Speziell bei kleinen Helis ist dies wichtig, da diese wenig Masse haben und die Komponenten sehr nah beieinander plaziert sind. Selbst die kleinsten Bewegungungen werden hier sofort auf das System übertragen. Sollten Sie in dieser Hinsicht irgendwelche Auffälligkeiten bemerken, wie ein sporadische zuckendes Heck oder ein lautes, hochfrequentes kreischen des Antriebs, so könnte dies bereits ein Indiz sein, dass die AttitudeControl nicht wie vorgesehen funktionieren wird.
Sollte das Problem zu beheben montieren Sie das MICROBEAST PLUS an einer anderen Stelle des Helis, möglichst weit weg von sämtlichen drehenden Teilen oder verwenden Sie ein weicheres Klebepad zur Befestigung. Im Übrigen sollten Sie unbedingt die Ursache für die Vibration finden und diese abstellen. Entfernen Sie hierzu am besten Haupt- und Heckrotorblätter und lassen Sie den Motor am Boden laufen (Vorsicht Verletzungsgefahr!), um eine Unwucht durch defekte Teile wie kaputte Kugellager oder verbogene Wellen zu finden.
Neben Vibrationen können auch starke Temperaturschwankungen dazu führen, dass die Sensoren driften und eine Bewegung anzeigen, obwohl keine stattfindet. Vor allem wenn die Umgebungstemperatur sehr niedrig oder sehr hoch ist, lassen sie dem Gerät genügend Zeit, sich zu akklimatisieren, bevor sie es in Betrieb nehmen.
Bitte beachten Sie, dass abhängig von den genannten Faktoren immer eine mehr oder weniger stark ausgeprägte Drift auf einem oder mehreren Sensoren vorhanden sein wird. Durch aufwändige Kalibrierung und Filtermechanismen wird die Einflussnahme dieser Faktoren so gut wie möglich unterbunden. Dennoch kann prinzipbedingt keine perfekte Lagestabilisierung gewährleistet werden. Insbesondere kann das System den Helikopter nicht absolut auf der Stelle halten. Hierzu wären zusätzliche Sensoren wie GPS- und Höhensensoren notwendig. Ein leichtes Abdriften des Helis in die eine oder andere Richtung ist vollkommen normal.