Difference between revisions of "Translations:Manuals:MBPlusFblV52:Receiver N/3/de"
Jump to navigation
Jump to search
Shornstein (talk | contribs) (Created page with "=Einstellung mit StudioX= Nach der Funktionszuweisung und Telemetrie-Einstellung wirst Du gefragt, ob die Failsafe Position für den Motor eingelernt werden soll. Falls im sp...") |
Shornstein (talk | contribs) |
||
| Line 1: | Line 1: | ||
| − | =Einstellung mit StudioX= | + | =Einstellung mit StudioX App= |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
Klicke in der Abfrage "Motor FailSafe-Position setzen" auf '''Fortfahren''' und bringe den Motorkanal/Gasknüppel an der Fernsteuerung auf die gewünschte Position. Drücke dann auf '''Speichern''' um die aktuelle Position zu speichern. '''Wenn am Ausgang [CH5]/[DI1] kein Servo oder Motorsteller angesteckt ist, wähle einfach '''Überspringen'''! | Klicke in der Abfrage "Motor FailSafe-Position setzen" auf '''Fortfahren''' und bringe den Motorkanal/Gasknüppel an der Fernsteuerung auf die gewünschte Position. Drücke dann auf '''Speichern''' um die aktuelle Position zu speichern. '''Wenn am Ausgang [CH5]/[DI1] kein Servo oder Motorsteller angesteckt ist, wähle einfach '''Überspringen'''! | ||
<br /> | <br /> | ||
| Line 25: | Line 15: | ||
</div><br /> | </div><br /> | ||
<br /> | <br /> | ||
| − | {{WARNING_QUOTE|'''Für die FailSafe-Einstellung ist der Ausgang [CH5 | + | {{WARNING_QUOTE|'''Für die FailSafe-Einstellung ist der Ausgang [CH5] aktiv und reagiert entsprechend auf Bewegungen des Motorkanals, so dass die FailSafe-Position kontrolliert werden kann.''' Trenne bei einem Elektromodell unbedingt den Motor vom Hauptgetriebe, so dass der Rotor des Helis nicht aus Versehen zu drehen beginnt! |
}} | }} | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
Latest revision as of 10:14, 9 March 2023
Einstellung mit StudioX App
Klicke in der Abfrage "Motor FailSafe-Position setzen" auf Fortfahren und bringe den Motorkanal/Gasknüppel an der Fernsteuerung auf die gewünschte Position. Drücke dann auf Speichern um die aktuelle Position zu speichern. Wenn am Ausgang [CH5]/[DI1] kein Servo oder Motorsteller angesteckt ist, wähle einfach Überspringen!
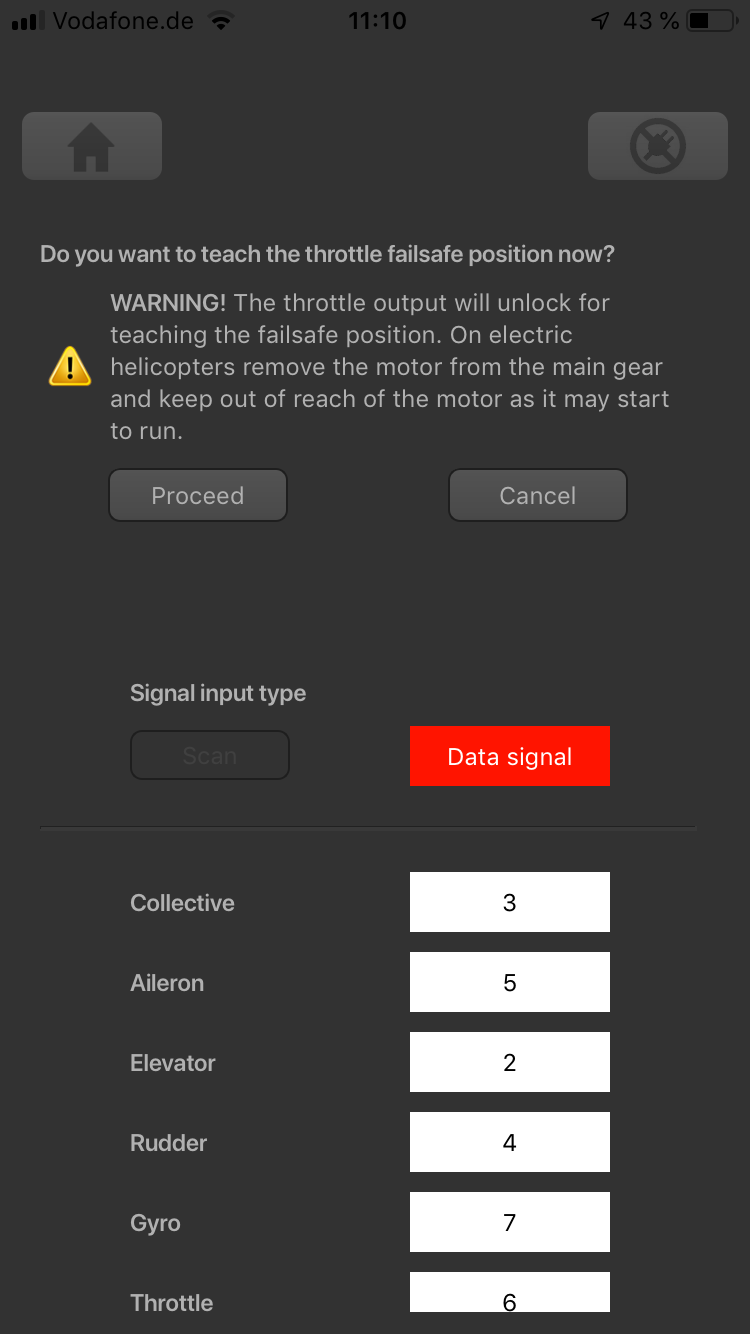
Wähle nach der Funktionszuordnung Fortfahren, um mit dem Einlernen der Failsafe Position zu beginnen
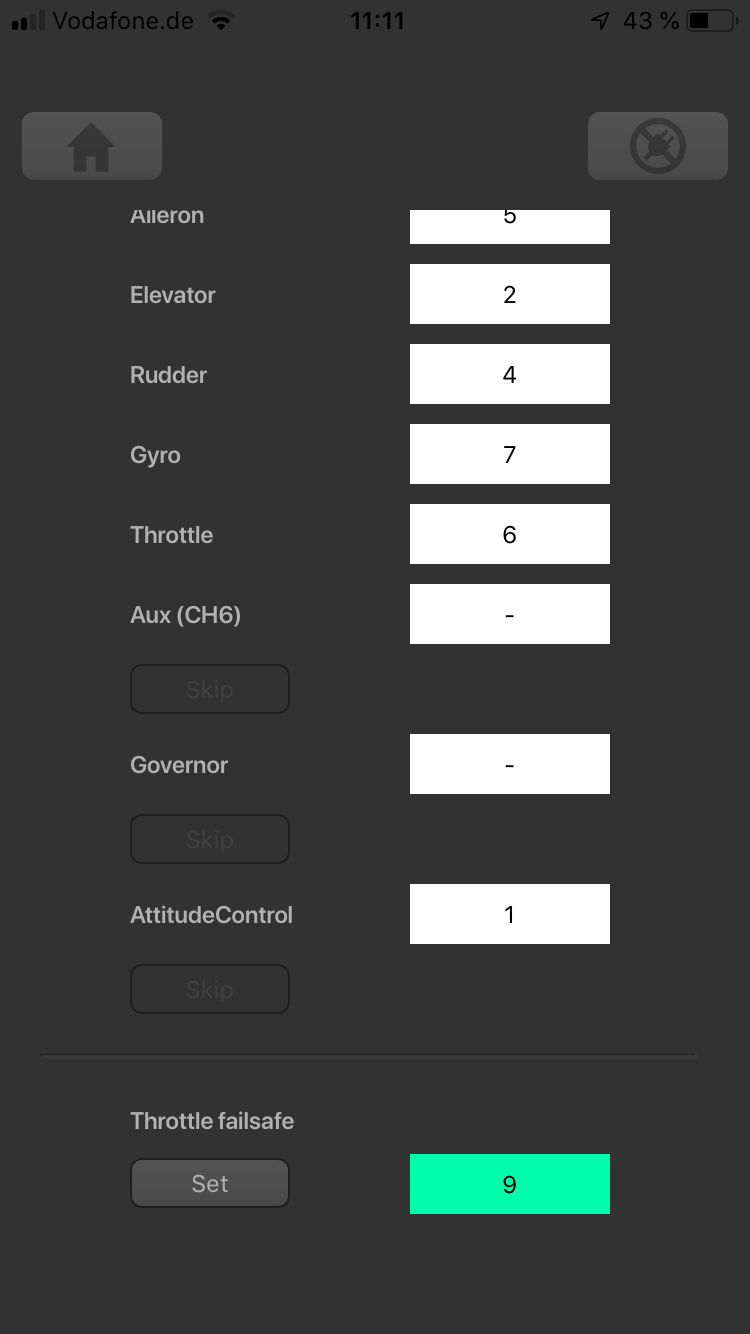
Bringe das Gas in die niedrigste Position, in welcher der Motor abgeschaltet ist
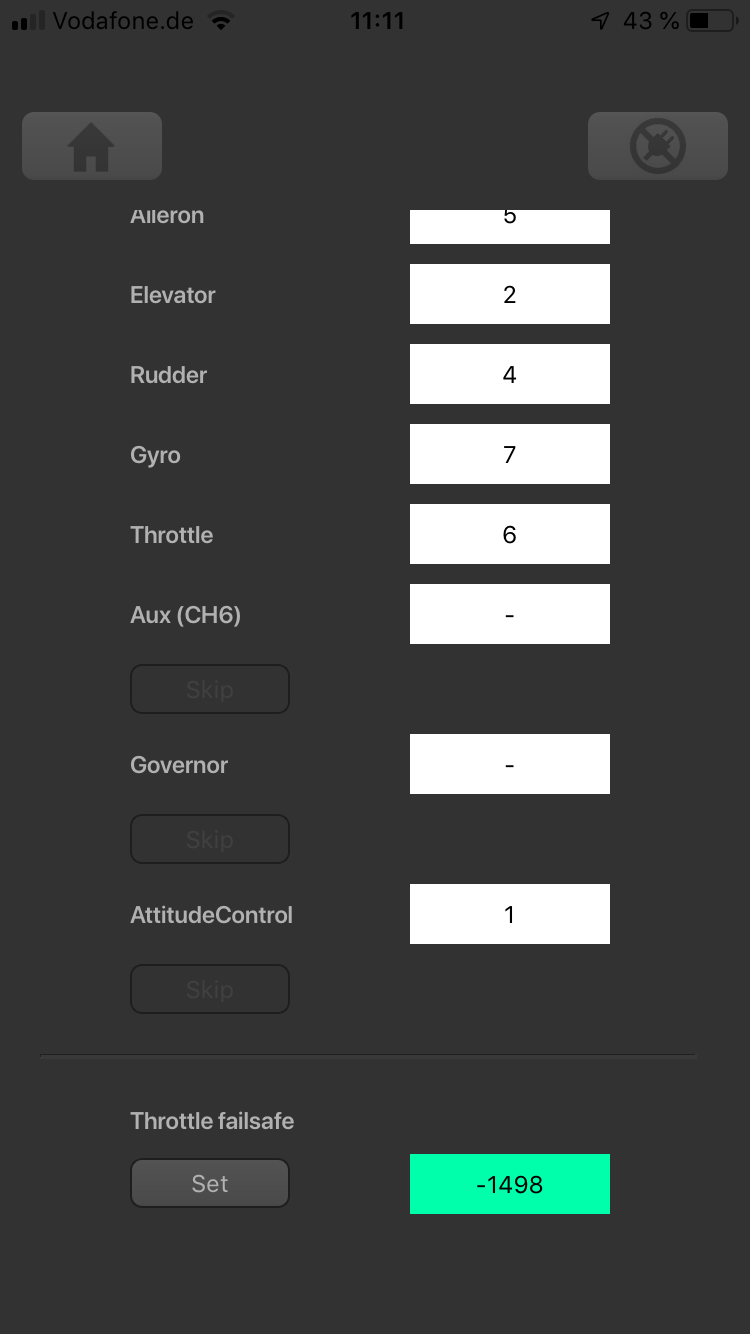
Wähle Speichern, um die FailSafe-Position zu speichern
Für die FailSafe-Einstellung ist der Ausgang [CH5] aktiv und reagiert entsprechend auf Bewegungen des Motorkanals, so dass die FailSafe-Position kontrolliert werden kann. Trenne bei einem Elektromodell unbedingt den Motor vom Hauptgetriebe, so dass der Rotor des Helis nicht aus Versehen zu drehen beginnt!