Manuals:BXFbl:Setupmenu E/de: Difference between revisions
Shornstein (talk | contribs) No edit summary |
Shornstein (talk | contribs) No edit summary |
||
| (16 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
{{TOC_BXFbl/de|Manuals:BXFbl:Setupmenu_D/de|Manuals:BXFbl: | {{TOC_BXFbl/de|Manuals:BXFbl:Setupmenu_D/de|Manuals:BXFbl:Setupmenu_E_TM/de|SETUPMENU|}} | ||
__TOC__ | __TOC__ | ||
<br /> | <br /> | ||
Als nächstes müssen wir das | Als nächstes müssen wir das Heckkreisel des BEASTX Systems einstellen. Hierbei legen wir die Endpositionen von Servo und Steuerknüppel sowie die Steuerrichtungen fest.<br /> | ||
<br /> | <br /> | ||
Die Endpositionen sind notwendig, um zu verhindern, dass der Kreisel das Servo über die mechanischen Grenzen hinaus bewegt und das Servo beschädigt. Beachte jedoch beim Einstellen der Positionen, dass der optimale Ausschlag nicht unbedingt durch den maximal möglichen Steuerweg des Heckpitch-Schiebers bestimmt wird. '''Wenn die Heckmechanik einen sehr großen Pitch-Bereich zulässt, kann es ratsam sein, die Grenzen basierend auf dem maximal zulässigen Anstellwinkel der Heckrotorblätter einzustellen.''' Andernfalls kann ein hoher Heckpitch-Ausschlag einen aerodynamischen Strömungsabriss der Blätter verursachen. Solche Strömungsabrisse können ein sehr schlechtes Stoppverhalten verursachen, wie z.B. ein Überschießen des Hecks beim Stoppen der Rotation, und können auch eine schlechte Heckreaktion auf Heckrotorhebeleingaben bei Richtungsänderungen verursachen. Denke daran, dies bei der Einstellung der Endpunkte des Heckrotors zu berücksichtigen! Sieh im Handbuch des Hubschraubers nach, um herauszufinden, wie viel Heckpitch nützlich ist und wo die Endpunkte gesetzt werden sollen.<br /> | |||
<br /> | <br /> | ||
| Line 18: | Line 18: | ||
<br /> | <br /> | ||
Befestige | Befestige den Servohebel am Heckservo so, dass die Heckanlenkungsstange einen 90-Grad-Winkel zum Hebel bildet (oder so nah wie möglich) und passe die Anlenkungsstange wie im Handbuch deines Hubschraubers beschrieben an. Bei den meisten Hubschraubern sollte in dieser Position die Schiebehülse am Heck auf der Heckwelle zentriert sein. Die Heckrotorblätter werden in dieser Position einen leicht positiven Pitch-Anstellwinkel haben, um das Drehmoment des Hauptrotors auszugleichen.<br /> | ||
<br /> | <br /> | ||
[[Image:Rudderservo_linkage.png|x100px|none]]<br /> | [[Image:Rudderservo_linkage.png|x100px|none]]<br /> | ||
<br /> | <br /> | ||
Diese mechanische Einstellung ist besonders wichtig, wenn | Diese mechanische Einstellung ist besonders wichtig, wenn der Heckkreisel im ''Normal-Modus'' verwendet wird. Wenn die Einstellung nicht korrekt durchgeführt wurde, wird der Hubschrauber ständig auf der Heckrotorachse zu einer Seite driften. Wenn das Heckkreisel nur im ''HeadingLock-Modus'' verwendet wird, ist diese Einstellung nicht so kritisch. Hier wird der Heckkreisel den Heckrotor aktiv steuern und eine mögliche Drift verhindern, so dass der Hubschrauber den Befehlen des Hecksteuerknüppels exakt folgt. Dennoch ist für die optimale Leistung des Kreisel eine gute mechanische Einstellung unerlässlich!<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
=Einstellung am Gerät= | =Einstellung am Gerät= | ||
Mit der EasySetup-Einstellung am Gerät ist dieser Schritt in zwei Menüpunkte unterteilt. Im Menüpunkt '''E''' setzen wir die | Mit der EasySetup-Einstellung am Gerät ist dieser Schritt in zwei Menüpunkte unterteilt. Im Menüpunkt '''E''' setzen wir die Endpositionen, im Menüpunkt '''F''' lernen wir die Steuerrichtung und -wege ein.<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
==SETUP-MENÜ E - Heckrotorgrenzen== | ==SETUP-MENÜ E - Heckrotorgrenzen== | ||
* Um die Servo-Limits einzustellen, bewege den | * Um die Servo-Limits einzustellen, bewege den Hecksteuerknüppel in eine Richtung, bis das Servo den maximalen Endpunkt erreicht, ohne dass es klemmt oder blockiert. Lasse den Hecksteuerknüppel los, wenn die richtige Position erreicht ist. Wenn du das Servo zu weit bewegt hast, kannst du den Steuerknüppel in die entgegengesetzte Richtung steuern und den Pitch-Schieber ein Stück zurückbewegen. Du kannst den Steuerknüppel auch kurz antippen, um nur geringfügige Anpassungen vorzunehmen. Sobald die richtige Endposition gefunden ist, bewege den Steuerknüppel nicht mehr und warte eine Sekunde, bis die Status-LED blinkt. Dies zeigt an, dass die neue Position gespeichert wurde. (Falls nötig, kannst du die Position so oft ändern, wie du möchtest, aber warte immer, bis die Status-LED blinkt, bevor du fertig bist und zum nächsten Schritt übergehst!) | ||
* Nun stelle die entgegengesetzte Richtung ein. Verwende dafür erneut den | * Nun stelle die entgegengesetzte Richtung ein. Verwende dafür erneut den Steuerknüppel und halte ihn, um das Servo/den Heckpitch-Schieber in die andere Richtung zu bewegen. Gehe wie oben beschrieben vor, um den maximalen Endpunkt einzustellen, und warte erneut, bis die Position durch das Blinken der Status-LED angezeigt wurde. | ||
* Wenn beide Positionen eingestellt sind, gehe zum nächsten Menüpunkt '''F''', indem du kurz den Einstellknopf drückst.<br /> | * Wenn beide Positionen eingestellt sind, gehe zum nächsten Menüpunkt '''F''', indem du kurz den Einstellknopf drückst.<br /> | ||
<br /> | <br /> | ||
==SETUP-MENÜ F - Heckrotor-Steuerrichtung== | ==SETUP-MENÜ F - Heckrotor-Steuerrichtung== | ||
* Bewege den | * Bewege den Hecksteuerknüppel und überprüfe die Richtung des Servos und Heckrotors am Hubschrauber. '''Wenn der Steuerknüppel das Servo in die falsche Richtung bewegt, verwende die Servo-Reverse-Funktion deines Senders''' und kehre den Heckkanal um, um die Steuerungsrichtung des Servos und Steuerknüppels korrekt einzustellen. | ||
* Stelle | * Stelle dann die Heckrotor-Steuerrichtung des BEASTX-Systems ein: Wenn du den Hecksteuerknüppel nach <span style="color: #4169E1;">'''rechts'''</span> bewegst, muss die Status-LED in <span style="color: #4169E1;">'''blau'''</span> leuchten oder blinken. Wenn du den Hecksteuerknüppel nach <span style="color: #DC143C;">'''links'''</span> bewegst, muss die Status-LED in <span style="color: #DC143C;">'''rot'''</span> leuchten oder blinken. '''Wenn die Anzeige falsch ist (rot = rechts und blau = links), kehre die Anzeige (interne Steuerrichtung) um, indem du einmal den Roll(!)-Steuerknüppel antippst.''' | ||
* Optional: Wenn du den | * Optional: Wenn du den Hecksteuerknüppel vollständig auslenkst, sollte die Status-LED durchgehend leuchten und nicht nur blinken. Falls dies nicht der Fall ist, '''erhöhe den Servo-Ausschlag/Endpunkt des Heckkanals im Sender so weit, dass die Status-LED von blinkend zu dauerhaft leuchtend wechselt, wenn der Hecksteuerknüppel die Endposition erreicht'''. (Hinweis: Erhöhe den Endpunkt im Sender nicht zu stark. Wir brauchen eine genaue Übereinstimmung von Steuerweg und der Endposition des Hecksteuerknüppel. Die Status-LED sollte also genau beim Erreichen der Endposition von blinkend zu dauerhaft leuchtend wechseln.)<br /> | ||
<br /> | <br /> | ||
{{QUOTE|Stelle immer zuerst die Servorichtungen im Sender ein und überprüfe dann die Statusanzeige deines BEASTX-Geräts oder in der StudioX-App. Ändere die interne Steuerrichtung, wenn sie nicht mit der tatsächlichen Richtung übereinstimmt. '''Ändere nicht die interne Richtung, um die Servorichtung zu ändern! | {{QUOTE|Stelle immer zuerst die Servorichtungen im Sender ein und überprüfe dann die Statusanzeige deines BEASTX-Geräts oder in der StudioX-App. Ändere die interne Steuerrichtung, wenn sie nicht mit der tatsächlichen Richtung übereinstimmt. '''Ändere nicht die interne Richtung, um die Servorichtung zu ändern! Die interne Richtung dient dazu, dem Kreisel mitzuteilen, in welche Richtung es das Servo bewegen muss.''' Sei sehr gewissenhaft bei diesem Einrichtungsschritt, da eine falsche Kreiselrichtung während des Starts zu Kontrollverlust führen und wahrscheinlich den Hubschrauber zum Absturz bringen wird!<br /> | ||
<br /> | <br /> | ||
'''Zusätzlich kannst du die | '''Zusätzlich kannst du die Kreiselrichtung überprüfen, indem du den Hubschrauber um seine Hochachse von Hand drehst.''' Wenn du den Heli drehst, sollte der Kreisel das Servo so bewegen, dass der Rotor eine Gegenbewegung zur Drehrichtung erzeugt. So wird der Kreisel auch später im Flug den Hubschrauber vor unerwünschter Bewegung stoppen. Hierbei wird die LED in '''blauer''' Farbe aufleuchten, wenn du den Hubschrauber nach '''rechts''' drehst, und in '''roter''' Farbe, wenn du ihn nach '''links''' drehst. Dadurch erhältst du eine kleine Erinnerungshilfe, wenn du nicht sicher bist, welche die richtige Stickrichtung für die Einrichtung ist, wenn du die Einrichtung später auf dem Feld durchführst!}}<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
=Einrichtung mit der StudioX-App= | =Einrichtung mit der StudioX-App= | ||
* Wenn du den | * Wenn du den Hecksteuerknüppel vollständig auslenkst, sollte die Status-LED am BEASTX-System durchgehend leuchten und das Label ''rechts'' oder ''links'' sollte entsprechend die Farbe ändern. Wenn der Steuerknüppel nicht weit genug bewegt wird, erscheint die Nachricht "Increase!". In diesem Fall '''erhöhe den Servo-Ausschlag/Endpunkt des Heckkanals im Sender so weit, bis die Status-LED von blinkend zu dauerleuchtend wechselt, wenn der Hecksteuerknüppel die Endposition erreicht'''. Die Anzeige ändert sich dann auch in der StudioX App. Wiederhole dies für die andere Richtung. Hinweis: Erhöhe den Steuerweg/Endpunkt im Sender nicht zu stark. Wir brauchen eine genaue Übereinstimmung des maximalen Steuerausschlags zwischen Fernsteuerung und BEASTX System. Die Status-LED sollte also genau beim Erreichen der Endposition von blinkend zu dauerleuchtend wechseln.<br /> | ||
<br /> | <br /> | ||
<div class=" | <html> | ||
< | <div class="ios-gallery-container"> | ||
<div class=" | <!-- Erstes Bild und Text --> | ||
</div> | <div class="ios-gallery-item"> | ||
<div class=" | <div class="ios-gallery-image"> | ||
< | <img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20037.PNG" alt="Screenshot"> | ||
<div class=" | </div> | ||
<div class="ios-gallery-text">Steuerknüppel auf Vollausschlag, aber keine Endwert nicht erreicht!</div> | |||
</div> | |||
<div class="ios-gallery-item"> | |||
<div class="ios-gallery-image"> | |||
<img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20038.PNG" alt="Screenshot"> | |||
</div> | |||
<div class="ios-gallery-text">Steuerknüppel auf Vollausschlag und Endwert erreicht</div> | |||
</div> | |||
</div> | </div> | ||
</html> | |||
<br /> | <br /> | ||
* Überprüfe nun die | * Überprüfe nun die Steuerrichtung des Servos am Hubschrauber. '''Wenn der Steuerknüppel das Servo in die falsche Richtung bewegt, verwende die Servo-Reverse-Funktion deines Senders''' und kehre dort den Heckkanal um, um die Richtung des Steuerknüppels zu ändern. Sobald das Servo richtig bewegt wird, stelle die Heckrotorrichtung des BEASTX-Systems ein: Wenn du den Steuerknüppel bzw. das Servo nach <span style="color: #4169E1;">'''rechts'''</span> bewegst, muss die Status-LED in <span style="color: #4169E1;">'''blau'''</span> leuchten oder blinken. Wenn du den Steuerknüppel nach <span style="color: #DC143C;">'''links'''</span> bewegst, muss die Status-LED in <span style="color: #DC143C;">'''rot'''</span> leuchten oder blinken. '''Wenn die Anzeige falsch ist (rot = rechts und blau = links), kehre die Anzeige (interne Steuerrichtung) um, indem du in der Software ''normal'' oder ''invertiert'' wählst.'''<br /> | ||
<br /> | <br /> | ||
<div class=" | <html> | ||
< | <div class="ios-gallery-container"> | ||
<div class=" | <!-- Erstes Bild und Text --> | ||
</div> | <div class="ios-gallery-item"> | ||
<div class=" | <div class="ios-gallery-image"> | ||
< | <img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20038.PNG" alt="Screenshot"> | ||
<div class=" | </div> | ||
<div class="ios-gallery-text">Steuerknüppel links, aber es wird rechts angezeigt!</div> | |||
</div> | |||
<div class="ios-gallery-item"> | |||
<div class="ios-gallery-image"> | |||
<img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20041.PNG" alt="Screenshot"> | |||
</div> | |||
<div class="ios-gallery-text">Steuerknüppel links und es wird links angezeigt</div> | |||
</div> | |||
</div> | </div> | ||
</html> | |||
<br /> | <br /> | ||
* Schließlich | * Schließlich stelle den maximal zulässigen Ausschlag ein, indem du die Werte in den beiden Feldern für jede Richtung änderst. Bewege hierzu den Hecksteuerknüppel vorsichtig, um das Servo zu bewegen (achte darauf, das Servo nicht zu blockieren) und erhöhe/verringere den maximal erlaubten Ausschlag nach Bedarf.<br /> | ||
<br /> | <br /> | ||
<div class=" | <html> | ||
< | <div class="ios-gallery-container"> | ||
<div class=" | <!-- Erstes Bild und Text --> | ||
<div class="ios-gallery-item"> | |||
<div class="ios-gallery-image"> | |||
<img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20040.PNG" alt="Screenshot"> | |||
</div> | |||
<div class="ios-gallery-text">Über + und - kannst Du die Endanschläge anpassen.</div> | |||
</div> | |||
</div> | </div> | ||
</html> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
{{QUOTE|Stelle immer zuerst die Servorichtungen im Sender ein und überprüfe dann die Statusanzeige deines BEASTX-Geräts oder in der StudioX-App. Ändere die interne Steuerrichtung, wenn sie nicht mit der tatsächlichen Richtung übereinstimmt. '''Ändere nicht die interne Richtung, um die Servorichtung zu ändern! | {{QUOTE|Stelle immer zuerst die Servorichtungen im Sender ein und überprüfe dann die Statusanzeige deines BEASTX-Geräts oder in der StudioX-App. Ändere die interne Steuerrichtung, wenn sie nicht mit der tatsächlichen Richtung übereinstimmt. '''Ändere nicht die interne Richtung, um die Servorichtung zu ändern! Die interne Richtung dient dazu, dem Kreisel mitzuteilen, in welche Richtung es das Servo bewegen muss.''' Sei sehr gewissenhaft bei diesem Einrichtungsschritt, da eine falsche Kreiselrichtung während des Starts zu Kontrollverlust führen und wahrscheinlich den Hubschrauber zum Absturz bringen wird!<br /> | ||
<br /> | <br /> | ||
'''Zusätzlich kannst du die Gyrorichtung überprüfen, indem du den Hubschrauber um seine vertikale Achse von Hand drehst.''' Beim Drehen des Hubschraubers sollte das Gyro das Servo so bewegen, dass der Rotor eine Gegenbewegung zur Drehrichtung erzeugt. Dadurch wird das Gyro später im Flug verhindern, dass der Hubschrauber unerwünschte Bewegungen ausführt.<br /> | '''Zusätzlich kannst du die Gyrorichtung überprüfen, indem du den Hubschrauber um seine vertikale Achse von Hand drehst.''' Beim Drehen des Hubschraubers sollte das Gyro das Servo so bewegen, dass der Rotor eine Gegenbewegung zur Drehrichtung erzeugt. Dadurch wird das Gyro später im Flug verhindern, dass der Hubschrauber unerwünschte Bewegungen ausführt.}}<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
| Line 96: | Line 121: | ||
=Zusätzliche Information: Wie der Heckkreisel funktioniert!= | =Zusätzliche Information: Wie der Heckkreisel funktioniert!= | ||
Der Heckkreisel wir immer versuchen, den Heli in die entgegengesetzte Richtung der Rotation zu steuern. Wenn du den Hubschrauber um seine | Der Heckkreisel wir immer versuchen, den Heli in die entgegengesetzte Richtung der Rotation zu steuern. Wenn du den Hubschrauber um seine Hochachse drehst, muss der Kreisel eine Bewegung des Heckservos veranlassen, um diese Rotation auszugleichen. Zum Beispiel, wenn du die Spitze des Hubschraubers nach links bewegst, muss der Kreisel nach rechts steuern, genauso wie du es mit dem Hecksteuerknüppel tun würdest, damit das Heck wieder nach zurück gesteuert wird.<br /> | ||
<br /> | <br /> | ||
<gallery widths="200" heights="250" style="font-size: 80%;"> | <gallery widths="200" heights="250" style="font-size: 80%;"> | ||
Image:Tailgyro_correct.png|Wenn du das Heck per Hand nach rechts bewegst ( | Image:Tailgyro_correct.png|Wenn du das Heck per Hand nach rechts bewegst (Spitze des Hubschraubers nach links), steuert das Kreisel nach rechts, damit das Heck wieder in Ausgangslage gebracht wird. | ||
Image:Tailgyro_wrong.png|Wenn du das Heck per Hand nach rechts bewegst ( | Image:Tailgyro_wrong.png|Wenn du das Heck per Hand nach rechts bewegst (Spitze des Hubschraubers nach links), steuert der Kreisel nach links und das Heck bewegt sich weiter nach rechts! | ||
</gallery> | </gallery> | ||
<br /> | <br /> | ||
Bitte beachte: | Bitte beachte: Der abgebildete ALIGN T-Rex Heli dient nur als Beispiel. Tatsächlich kann sich bei deinem Hubschrauber die Heck-Schiebehülse in Neutralposition an einer anderen Position befinden. Dies hängt hauptsächlich davon ab, wie die Blattgriffe des Heckrotors gesteuert werden und wie die Heckmechanik konstruiert ist. Lies das Handbuch deines Helikopters, um herauszufinden, in welche Richtungen sich der Heckrotor bei deinem Modell bewegen muss und wie die Mechanik eingestellt werden muss.<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
Latest revision as of 14:07, 20 August 2024
Als nächstes müssen wir das Heckkreisel des BEASTX Systems einstellen. Hierbei legen wir die Endpositionen von Servo und Steuerknüppel sowie die Steuerrichtungen fest.
Die Endpositionen sind notwendig, um zu verhindern, dass der Kreisel das Servo über die mechanischen Grenzen hinaus bewegt und das Servo beschädigt. Beachte jedoch beim Einstellen der Positionen, dass der optimale Ausschlag nicht unbedingt durch den maximal möglichen Steuerweg des Heckpitch-Schiebers bestimmt wird. Wenn die Heckmechanik einen sehr großen Pitch-Bereich zulässt, kann es ratsam sein, die Grenzen basierend auf dem maximal zulässigen Anstellwinkel der Heckrotorblätter einzustellen. Andernfalls kann ein hoher Heckpitch-Ausschlag einen aerodynamischen Strömungsabriss der Blätter verursachen. Solche Strömungsabrisse können ein sehr schlechtes Stoppverhalten verursachen, wie z.B. ein Überschießen des Hecks beim Stoppen der Rotation, und können auch eine schlechte Heckreaktion auf Heckrotorhebeleingaben bei Richtungsänderungen verursachen. Denke daran, dies bei der Einstellung der Endpunkte des Heckrotors zu berücksichtigen! Sieh im Handbuch des Hubschraubers nach, um herauszufinden, wie viel Heckpitch nützlich ist und wo die Endpunkte gesetzt werden sollen.
| Hinweis: Dieser Einrichtungsschritt gilt für BEASTX Geräte mit standardmäßiger Heckservosteuerung. Wenn du einen Hubschrauber mit Heckmotor verwendest, folge bitte der Beschreibung auf der nächsten Seite. Stelle sicher, dass du die richtige Firmware installiert hast, bei der die Funktion Heckmotor aktiviert oder deaktiviert ist. Wenn du die Heckmotor-Firmware verwendest, wirst du dein Heckservo nicht wie unten gezeigt korrekt steuern können und umgekehrt! |
Mechanische Einrichtung des Heckservos
Im folgenden Schritt dieser Einrichtung wirst du aufgefordert, das Heckservo an dein BEASTX Gerät anzuschließen. Beim MICROBEAST PLUS/ULTRA wird das Servo an den [CH4] Ausgang angeschlossen. Achte auf die korrekte Polarität, das schwarze oder braune Minus-Kabel muss am nächsten zur Unterseite des Geräts liegen. Beim NANOBEAST schließe das Servo bitte an den [CH2] Ausgang an. Hier ist die Servo-Polarität ähnlich wie bei SPEKTRUM/Horizon Hobby Servos, von innen nach außen: Signal, Minus, Plus.

Befestige den Servohebel am Heckservo so, dass die Heckanlenkungsstange einen 90-Grad-Winkel zum Hebel bildet (oder so nah wie möglich) und passe die Anlenkungsstange wie im Handbuch deines Hubschraubers beschrieben an. Bei den meisten Hubschraubern sollte in dieser Position die Schiebehülse am Heck auf der Heckwelle zentriert sein. Die Heckrotorblätter werden in dieser Position einen leicht positiven Pitch-Anstellwinkel haben, um das Drehmoment des Hauptrotors auszugleichen.

Diese mechanische Einstellung ist besonders wichtig, wenn der Heckkreisel im Normal-Modus verwendet wird. Wenn die Einstellung nicht korrekt durchgeführt wurde, wird der Hubschrauber ständig auf der Heckrotorachse zu einer Seite driften. Wenn das Heckkreisel nur im HeadingLock-Modus verwendet wird, ist diese Einstellung nicht so kritisch. Hier wird der Heckkreisel den Heckrotor aktiv steuern und eine mögliche Drift verhindern, so dass der Hubschrauber den Befehlen des Hecksteuerknüppels exakt folgt. Dennoch ist für die optimale Leistung des Kreisel eine gute mechanische Einstellung unerlässlich!
Einstellung am Gerät
Mit der EasySetup-Einstellung am Gerät ist dieser Schritt in zwei Menüpunkte unterteilt. Im Menüpunkt E setzen wir die Endpositionen, im Menüpunkt F lernen wir die Steuerrichtung und -wege ein.
SETUP-MENÜ E - Heckrotorgrenzen
- Um die Servo-Limits einzustellen, bewege den Hecksteuerknüppel in eine Richtung, bis das Servo den maximalen Endpunkt erreicht, ohne dass es klemmt oder blockiert. Lasse den Hecksteuerknüppel los, wenn die richtige Position erreicht ist. Wenn du das Servo zu weit bewegt hast, kannst du den Steuerknüppel in die entgegengesetzte Richtung steuern und den Pitch-Schieber ein Stück zurückbewegen. Du kannst den Steuerknüppel auch kurz antippen, um nur geringfügige Anpassungen vorzunehmen. Sobald die richtige Endposition gefunden ist, bewege den Steuerknüppel nicht mehr und warte eine Sekunde, bis die Status-LED blinkt. Dies zeigt an, dass die neue Position gespeichert wurde. (Falls nötig, kannst du die Position so oft ändern, wie du möchtest, aber warte immer, bis die Status-LED blinkt, bevor du fertig bist und zum nächsten Schritt übergehst!)
- Nun stelle die entgegengesetzte Richtung ein. Verwende dafür erneut den Steuerknüppel und halte ihn, um das Servo/den Heckpitch-Schieber in die andere Richtung zu bewegen. Gehe wie oben beschrieben vor, um den maximalen Endpunkt einzustellen, und warte erneut, bis die Position durch das Blinken der Status-LED angezeigt wurde.
- Wenn beide Positionen eingestellt sind, gehe zum nächsten Menüpunkt F, indem du kurz den Einstellknopf drückst.
SETUP-MENÜ F - Heckrotor-Steuerrichtung
- Bewege den Hecksteuerknüppel und überprüfe die Richtung des Servos und Heckrotors am Hubschrauber. Wenn der Steuerknüppel das Servo in die falsche Richtung bewegt, verwende die Servo-Reverse-Funktion deines Senders und kehre den Heckkanal um, um die Steuerungsrichtung des Servos und Steuerknüppels korrekt einzustellen.
- Stelle dann die Heckrotor-Steuerrichtung des BEASTX-Systems ein: Wenn du den Hecksteuerknüppel nach rechts bewegst, muss die Status-LED in blau leuchten oder blinken. Wenn du den Hecksteuerknüppel nach links bewegst, muss die Status-LED in rot leuchten oder blinken. Wenn die Anzeige falsch ist (rot = rechts und blau = links), kehre die Anzeige (interne Steuerrichtung) um, indem du einmal den Roll(!)-Steuerknüppel antippst.
- Optional: Wenn du den Hecksteuerknüppel vollständig auslenkst, sollte die Status-LED durchgehend leuchten und nicht nur blinken. Falls dies nicht der Fall ist, erhöhe den Servo-Ausschlag/Endpunkt des Heckkanals im Sender so weit, dass die Status-LED von blinkend zu dauerhaft leuchtend wechselt, wenn der Hecksteuerknüppel die Endposition erreicht. (Hinweis: Erhöhe den Endpunkt im Sender nicht zu stark. Wir brauchen eine genaue Übereinstimmung von Steuerweg und der Endposition des Hecksteuerknüppel. Die Status-LED sollte also genau beim Erreichen der Endposition von blinkend zu dauerhaft leuchtend wechseln.)
Stelle immer zuerst die Servorichtungen im Sender ein und überprüfe dann die Statusanzeige deines BEASTX-Geräts oder in der StudioX-App. Ändere die interne Steuerrichtung, wenn sie nicht mit der tatsächlichen Richtung übereinstimmt. Ändere nicht die interne Richtung, um die Servorichtung zu ändern! Die interne Richtung dient dazu, dem Kreisel mitzuteilen, in welche Richtung es das Servo bewegen muss. Sei sehr gewissenhaft bei diesem Einrichtungsschritt, da eine falsche Kreiselrichtung während des Starts zu Kontrollverlust führen und wahrscheinlich den Hubschrauber zum Absturz bringen wird!
Zusätzlich kannst du die Kreiselrichtung überprüfen, indem du den Hubschrauber um seine Hochachse von Hand drehst. Wenn du den Heli drehst, sollte der Kreisel das Servo so bewegen, dass der Rotor eine Gegenbewegung zur Drehrichtung erzeugt. So wird der Kreisel auch später im Flug den Hubschrauber vor unerwünschter Bewegung stoppen. Hierbei wird die LED in blauer Farbe aufleuchten, wenn du den Hubschrauber nach rechts drehst, und in roter Farbe, wenn du ihn nach links drehst. Dadurch erhältst du eine kleine Erinnerungshilfe, wenn du nicht sicher bist, welche die richtige Stickrichtung für die Einrichtung ist, wenn du die Einrichtung später auf dem Feld durchführst!
Einrichtung mit der StudioX-App
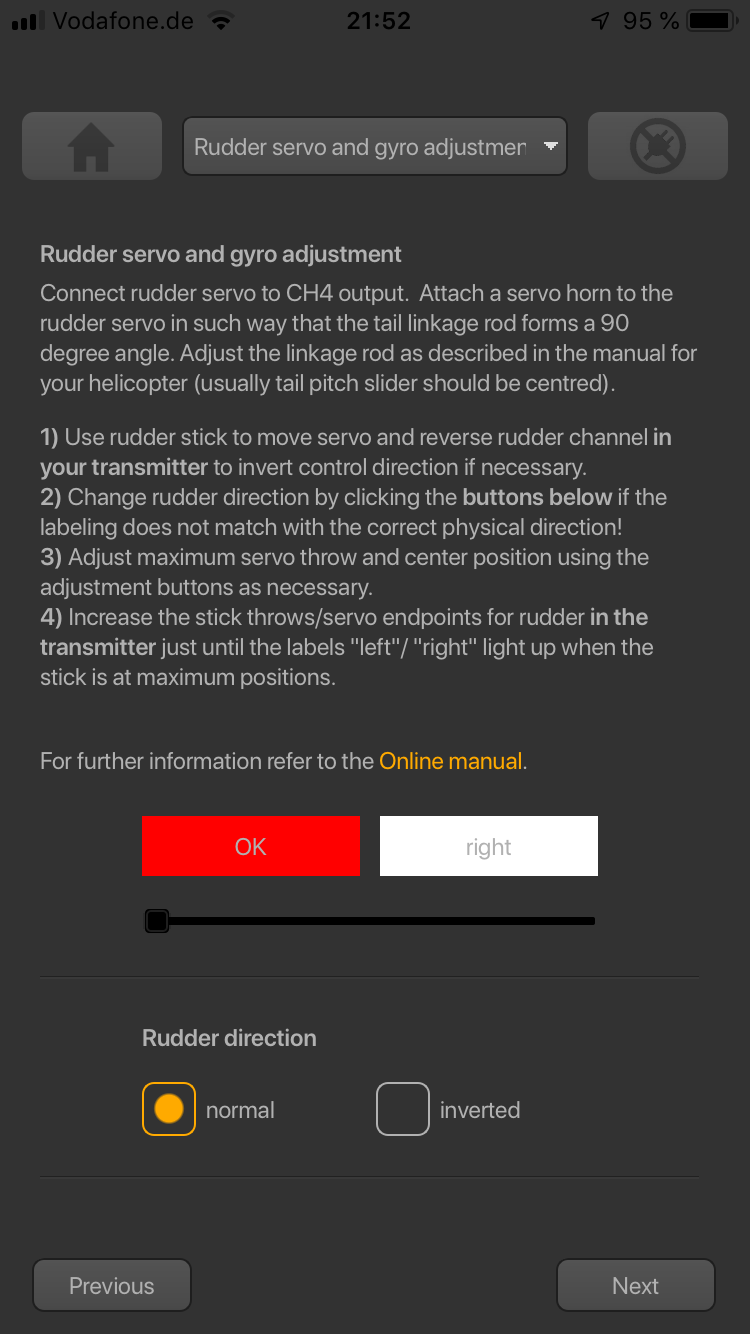
- Wenn du den Hecksteuerknüppel vollständig auslenkst, sollte die Status-LED am BEASTX-System durchgehend leuchten und das Label rechts oder links sollte entsprechend die Farbe ändern. Wenn der Steuerknüppel nicht weit genug bewegt wird, erscheint die Nachricht "Increase!". In diesem Fall erhöhe den Servo-Ausschlag/Endpunkt des Heckkanals im Sender so weit, bis die Status-LED von blinkend zu dauerleuchtend wechselt, wenn der Hecksteuerknüppel die Endposition erreicht. Die Anzeige ändert sich dann auch in der StudioX App. Wiederhole dies für die andere Richtung. Hinweis: Erhöhe den Steuerweg/Endpunkt im Sender nicht zu stark. Wir brauchen eine genaue Übereinstimmung des maximalen Steuerausschlags zwischen Fernsteuerung und BEASTX System. Die Status-LED sollte also genau beim Erreichen der Endposition von blinkend zu dauerleuchtend wechseln.

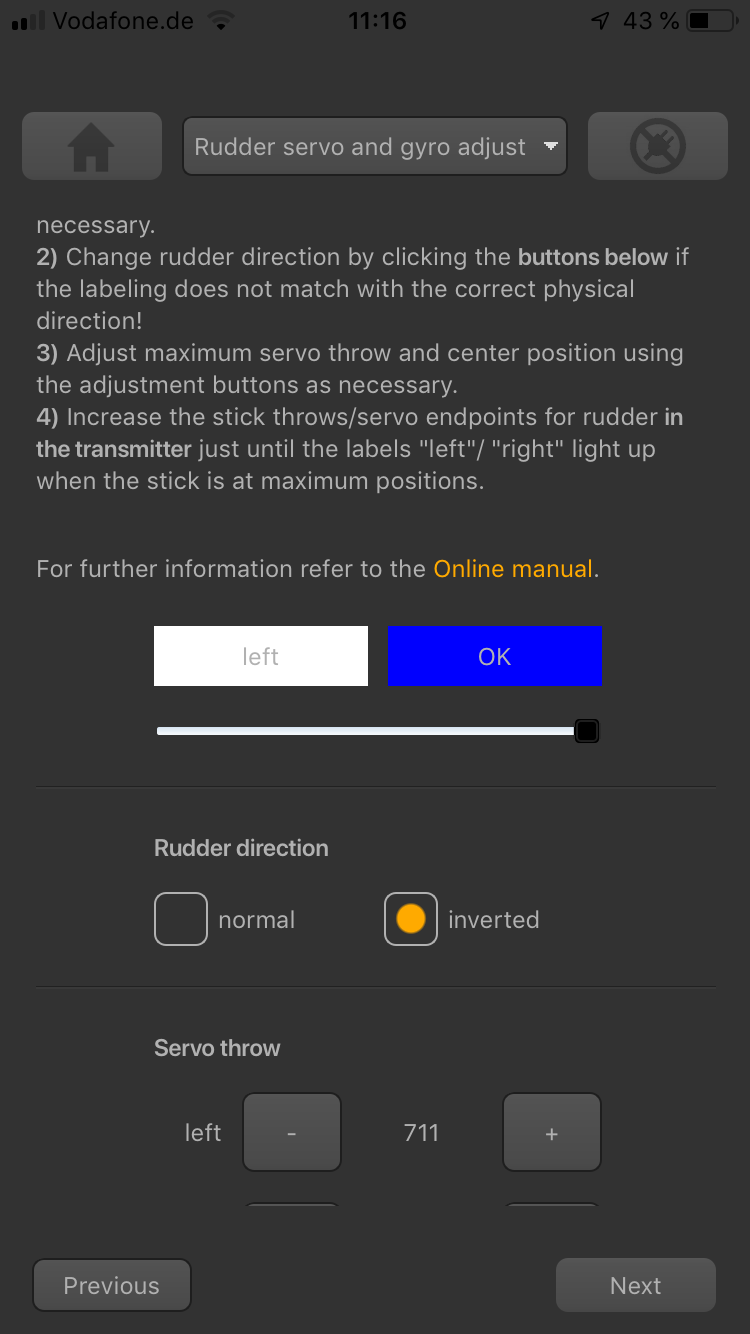
- Überprüfe nun die Steuerrichtung des Servos am Hubschrauber. Wenn der Steuerknüppel das Servo in die falsche Richtung bewegt, verwende die Servo-Reverse-Funktion deines Senders und kehre dort den Heckkanal um, um die Richtung des Steuerknüppels zu ändern. Sobald das Servo richtig bewegt wird, stelle die Heckrotorrichtung des BEASTX-Systems ein: Wenn du den Steuerknüppel bzw. das Servo nach rechts bewegst, muss die Status-LED in blau leuchten oder blinken. Wenn du den Steuerknüppel nach links bewegst, muss die Status-LED in rot leuchten oder blinken. Wenn die Anzeige falsch ist (rot = rechts und blau = links), kehre die Anzeige (interne Steuerrichtung) um, indem du in der Software normal oder invertiert wählst.
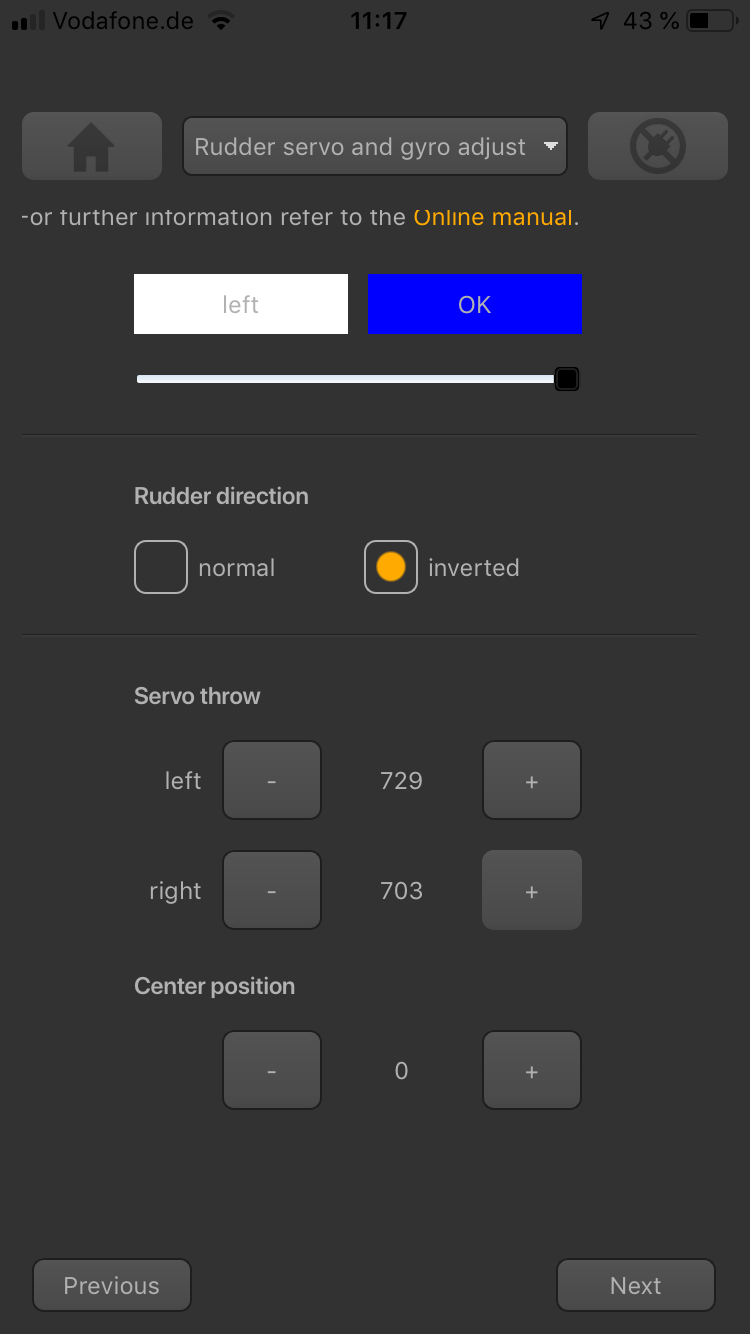
- Schließlich stelle den maximal zulässigen Ausschlag ein, indem du die Werte in den beiden Feldern für jede Richtung änderst. Bewege hierzu den Hecksteuerknüppel vorsichtig, um das Servo zu bewegen (achte darauf, das Servo nicht zu blockieren) und erhöhe/verringere den maximal erlaubten Ausschlag nach Bedarf.
Stelle immer zuerst die Servorichtungen im Sender ein und überprüfe dann die Statusanzeige deines BEASTX-Geräts oder in der StudioX-App. Ändere die interne Steuerrichtung, wenn sie nicht mit der tatsächlichen Richtung übereinstimmt. Ändere nicht die interne Richtung, um die Servorichtung zu ändern! Die interne Richtung dient dazu, dem Kreisel mitzuteilen, in welche Richtung es das Servo bewegen muss. Sei sehr gewissenhaft bei diesem Einrichtungsschritt, da eine falsche Kreiselrichtung während des Starts zu Kontrollverlust führen und wahrscheinlich den Hubschrauber zum Absturz bringen wird!
Zusätzlich kannst du die Gyrorichtung überprüfen, indem du den Hubschrauber um seine vertikale Achse von Hand drehst. Beim Drehen des Hubschraubers sollte das Gyro das Servo so bewegen, dass der Rotor eine Gegenbewegung zur Drehrichtung erzeugt. Dadurch wird das Gyro später im Flug verhindern, dass der Hubschrauber unerwünschte Bewegungen ausführt.
Zusätzliche Information: Warum die Endpunkte des Steuerknüppels einstellen?
Dies stellt sicher, dass der Steuerbereich des Funksystems mit dem internen Bereich des BEASTX-Systems übereinstimmt. Später, wenn du den Steuerstil einstellst, kannst du anpassen, wie schnell dein Hubschrauber sich um die vertikale Achse drehen soll. Um reproduzierbare Ergebnisse zu erzielen, musst du deine Fernsteuerung auf das System abstimmen!
Zusätzliche Information: Wie der Heckkreisel funktioniert!
Der Heckkreisel wir immer versuchen, den Heli in die entgegengesetzte Richtung der Rotation zu steuern. Wenn du den Hubschrauber um seine Hochachse drehst, muss der Kreisel eine Bewegung des Heckservos veranlassen, um diese Rotation auszugleichen. Zum Beispiel, wenn du die Spitze des Hubschraubers nach links bewegst, muss der Kreisel nach rechts steuern, genauso wie du es mit dem Hecksteuerknüppel tun würdest, damit das Heck wieder nach zurück gesteuert wird.
-
 Wenn du das Heck per Hand nach rechts bewegst (Spitze des Hubschraubers nach links), steuert das Kreisel nach rechts, damit das Heck wieder in Ausgangslage gebracht wird.
Wenn du das Heck per Hand nach rechts bewegst (Spitze des Hubschraubers nach links), steuert das Kreisel nach rechts, damit das Heck wieder in Ausgangslage gebracht wird. -
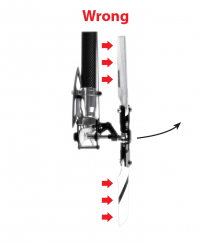 Wenn du das Heck per Hand nach rechts bewegst (Spitze des Hubschraubers nach links), steuert der Kreisel nach links und das Heck bewegt sich weiter nach rechts!
Wenn du das Heck per Hand nach rechts bewegst (Spitze des Hubschraubers nach links), steuert der Kreisel nach links und das Heck bewegt sich weiter nach rechts!


Bitte beachte: Der abgebildete ALIGN T-Rex Heli dient nur als Beispiel. Tatsächlich kann sich bei deinem Hubschrauber die Heck-Schiebehülse in Neutralposition an einer anderen Position befinden. Dies hängt hauptsächlich davon ab, wie die Blattgriffe des Heckrotors gesteuert werden und wie die Heckmechanik konstruiert ist. Lies das Handbuch deines Helikopters, um herauszufinden, in welche Richtungen sich der Heckrotor bei deinem Modell bewegen muss und wie die Mechanik eingestellt werden muss.