Manuals:BXFbl:Setupmenu B/de: Difference between revisions
Updating to match new version of source page |
Shornstein (talk | contribs) No edit summary |
||
| (19 intermediate revisions by 2 users not shown) | |||
| Line 3: | Line 3: | ||
<br /> | <br /> | ||
Punkt '''B''' vom SETUPMENÜ dient zur Auswahl der Ansteuerfrequenz (Pulsrate) der Taumelscheibenservos. Um die Leistung des BEASTX Systems zu maximieren, gilt die Regel: je höher, desto besser! Mit einer hohen Frequenz berechnet das System Korrekturbewegungen häufiger und sendet infolgedessen öfter neue Befehle an die Servos. Dies ermöglicht eine wesentlich höhere Präzision bei der Steuerung und Stabilisierung. Das bedeutet aber auch, dass die Servos innerhalb eines bestimmten Zeitraums mehr Positionsänderungen durchführen müssen. Wenn Dein Servo nicht für diese Art von Anwendung ausgelegt ist, kann dies zu einem hohen Stromverbrauch der Servos führen und dazu, dass die Servos sehr heiß werden. Wenn dies passiert, reduziere die Frequenz sofort, um zu verhindern, dass Deine Servos beschädigt werden. Gehe nur so hoch, wie vom Servohersteller empfohlen, oder sogar niedriger, wenn der Servo nicht in der Lage ist, solch hohe Frequenzen unter Last zu bewältigen.<br /> | |||
Punkt '''B''' vom SETUPMENÜ dient zur Auswahl der Ansteuerfrequenz (Pulsrate) der Taumelscheibenservos. Um die Leistung des | |||
<br /> | <br /> | ||
'''Hinweise:''' | '''Hinweise:''' | ||
* Wenn Du ein Servo verwendest, das eine höhere Frequenz erlaubt, als am | * Wenn Du ein Servo verwendest, das eine höhere Frequenz erlaubt, als am BEASTX System einstellbar ist, oder das eine maximale Frequenz zulässt, die nicht ausgewählt werden kann, wähle bitte die nächst kleinere Frequenz oder stelle die genaue Frequenz über die StudioX-App ein. Die Verwendung einer niedrigeren Frequenz ist immer möglich. Nur zu hohe Frequenzen können das Servo beschädigen und/oder dazu führen, dass das Servo nicht ordnungsgemäß funktioniert. [[The_BEASTX_servo_list/de|Hier]] findest du eine Liste mit Parametern für die gängigsten Servos. Bitte beachte, dass wir nicht alle Servotypen auflisten können. Wir können auch nicht die Genauigkeit dieser Daten garantieren. Frage den Hersteller der Servos oder Deinen Servohändler nach detaillierten Informationen. | ||
* Bei hohen Frequenzen laufen einige Servos ruckelig, insbesondere extrem schnelle und stellgenaue Servos mit Coreless oder Brushless Antrieb. Dies liegt an der hohen Aktualisierungsfrequenz, die das Servo erhält. Dies ist nicht kritisch und wirkt sich nicht auf die Flugleistung aus.<br /> | * Bei hohen Frequenzen laufen einige Servos ruckelig, insbesondere extrem schnelle und stellgenaue Servos mit Coreless oder Brushless Antrieb. Dies liegt an der hohen Aktualisierungsfrequenz, die das Servo erhält. Dies ist nicht kritisch und wirkt sich nicht auf die Flugleistung aus.<br /> | ||
<br /> | <br /> | ||
| Line 13: | Line 12: | ||
}}<br /> | }}<br /> | ||
<br /> | <br /> | ||
= | =Einstellung am Gerät= | ||
Stelle die Ansteuerfrequenz für die Taumelscheibenservos durch Auswahl über den Hecksteuerknüppel so ein, dass die Status LED Farbe bei Punkt B in der passenden Farbe leuchtet:<br /> | |||
<br /> | <br /> | ||
{{TABLEV5| | {{TABLEV5/de|Ansteuerfrequenz|50 Hz|65 Hz|120 Hz|165 Hz|200 Hz}}<br /> | ||
''' | '''Hinweis:''' Wenn über die StudioX App ein anderer Wert eingestellt wurde, ist die Status LED '''aus'''. Du kannst hier jederzeit mit dem Hecksteuerknüppel einen der vorgegebenen Werte auswählen, der benutzerdefinierte Wert wird dann aber gelöscht!<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
= | = StudioX-App = | ||
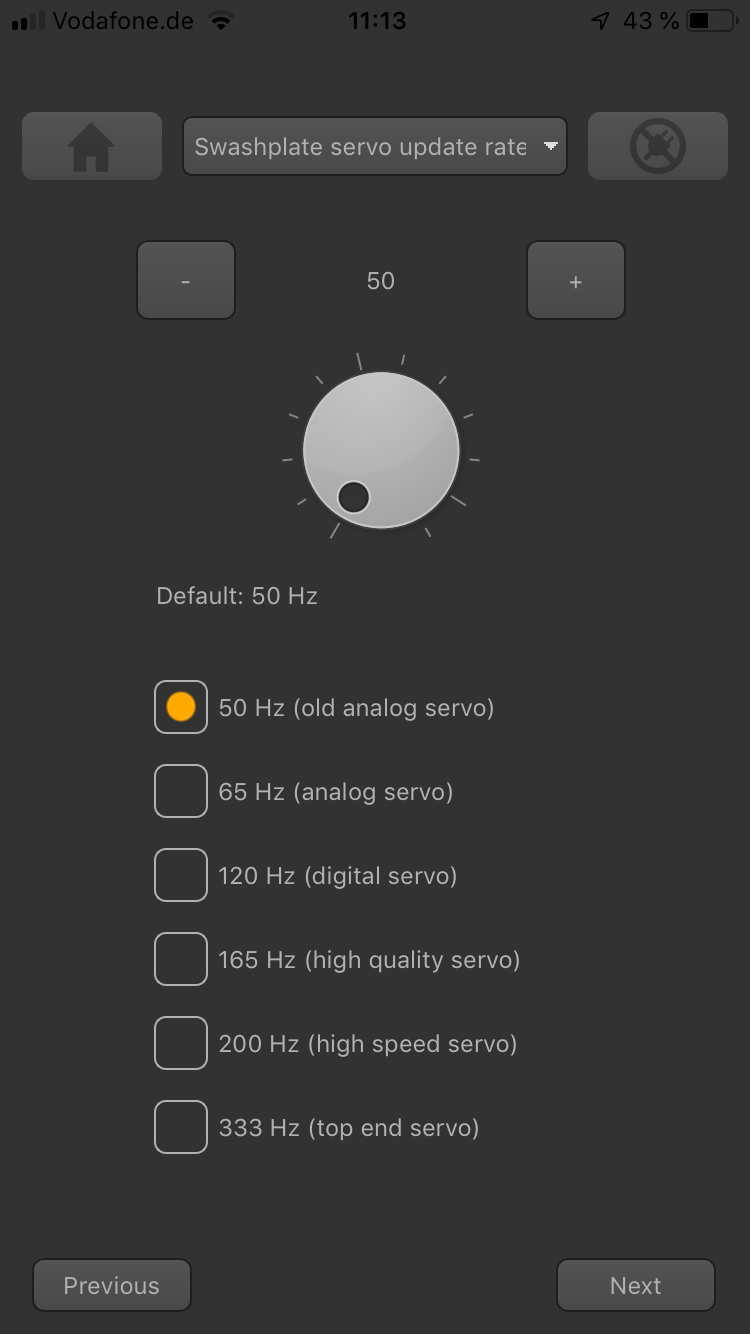
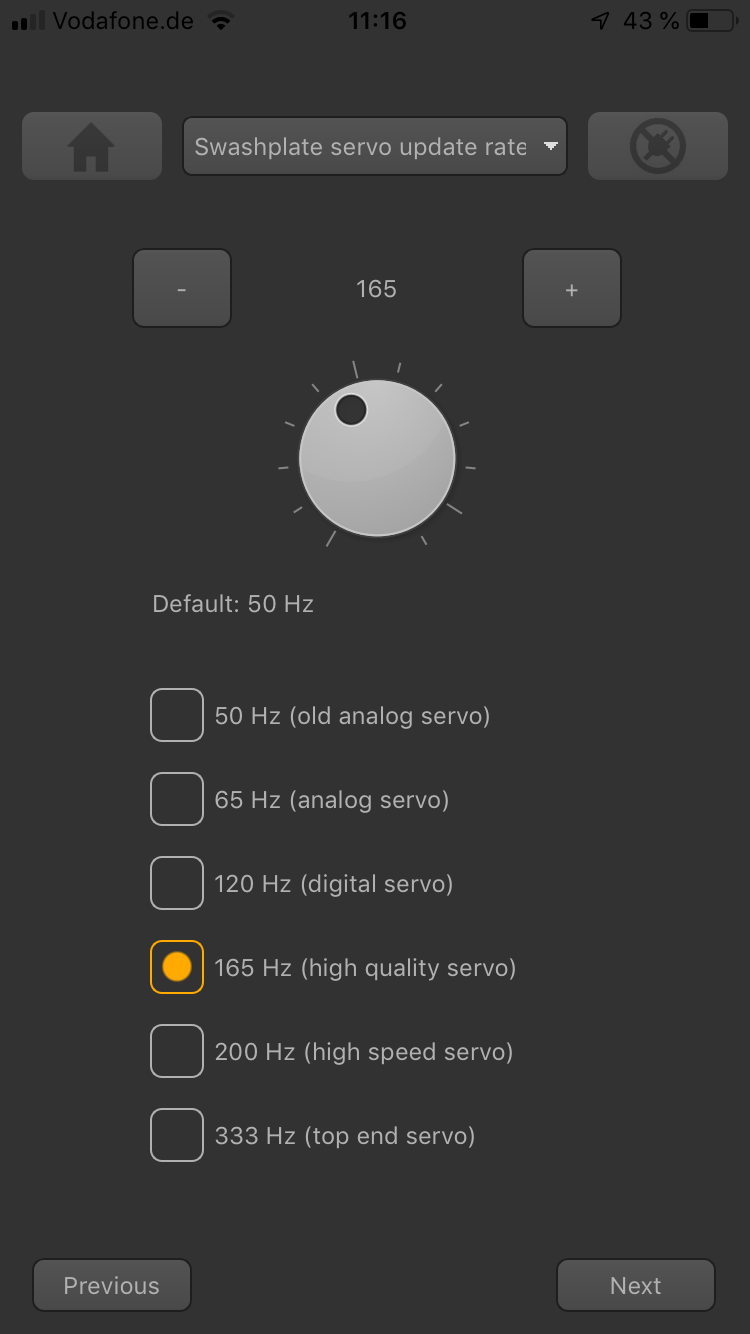
Wähle eine voreingestellte Frequenz, indem Du eine der Schaltflächen bei Menüpunkt B (Ansteuerfrequenz Taumelscheibe) anklickst, oder stelle eine benutzerdefinierte Frequenz ein, indem Du auf das Zahnrad klickst und dann den Wert direkt mit dem Drehrad änderst. Mit einer benutzerdefinierten Frequenz kannst Du eine Wiederholrate von bis zu 400 Hz einstellen. Das ist mehr als ausreichend, selbst für die schnellsten Servos auf dem Markt.<br /> | |||
<br /> | <br /> | ||
<div class=" | <html> | ||
< | <div class="ios-gallery-container"> | ||
<div class=" | <!-- Erstes Bild und Text --> | ||
</div> | <div class="ios-gallery-item"> | ||
<div class=" | <div class="ios-gallery-image"> | ||
< | <img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20031.PNG" alt="Screenshot"> | ||
<div class=" | </div> | ||
<div class="ios-gallery-text">Wähle eine vorgegebene Frequenz ...</div> | |||
</div> | |||
<div class="ios-gallery-item"> | |||
<div class="ios-gallery-image"> | |||
<img src="https://wiki.beastx.com/images/studiox/freakware%202019-07-09%20035.PNG" alt="Screenshot"> | |||
</div> | |||
<div class="ios-gallery-text">... oder stelle sie beliebig mit dem Drehknopf ein.</div> | |||
</div> | |||
</div> | </div> | ||
</html> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
= | = Servos anschließen = | ||
Nachdem Du die richtige Aktualisierungsfrequenz eingestellt hast, stecke die Taumelscheibenservos ein. Achtung: Installiere die Servohörner noch nicht, da die Servos beim ersten Einschalten blockieren und beschädigt werden könnten! Setze die Servohörner erst auf, nachdem die Servos angesteckt wurden.<br /> | |||
<br /> | <br /> | ||
Wenn du die Kabel in deinem Modell verlegst, achte darauf, dass keine Zugspannung am Flybarless System anliegt. Stelle sicher, dass das Gehäuse frei beweglich ist, und keine Vibrationen über die Servokabel auf das Gerät übertragen werden. Die Kabel sollten nicht in der Nähe des Gehäuses gebündelt oder befestigt werden. Verwende insbesondere keinen Schrumpfschlauch, um die Verkabelung in unmittelbarer Nähe zum Punkt, an dem die Kabel in das BEASTX-System eingesteckt sind, zu bündeln oder zu umhüllen. Dies macht die Kabel steif und unflexibel und kann Vibrationen verursachen! Es ist nach unserer Erfahrung besser, wenn sie einige Zentimeter frei liegen und flexibel bleiben. Danach sollten sie so am Heli befestigt werden, dass sie während des Fluges nicht durch die Fliehkraft hin- und her bewegt werden.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
| Line 52: | Line 59: | ||
<br /> | <br /> | ||
* | * Das Höhenruder-Servo wird immer in den [CH1]-Anschluss gesteckt. | ||
* | * Bei elektronischer Taumelscheibenmischung müssen die beiden Querruderservos an [CH2] (links) und [CH3] (rechts) angeschlossen werden. | ||
* | * Bei mechanischer Taumelscheibenmischung (H1-Mischung) wird das Querruderservo an [CH2] und das Kollektiv-Servos an [CH3] angeschlossen. | ||
<br /> | |||
'''Zusätzliches Taumelscheibenservo für Scale Helikopter'''<br /> | |||
Wenn Du einen Scale-Hubschrauber mit 90 Grad eCCPM verwendest, kannst Du ein zweites Höhenruder-Servo an den Ausgang [CH7] des MICROBEAST PLUS anschließen. Beim MICROBEAST ULTRA wird das zweite Höhenruder-Servo an den Ausgang [CH6] angeschlossen. Beachte, dass diese Ausgänge nur Signalausgänge sind. Du musst das Servo daher anderweitig mit Strom versorgen, z. B. indem Du den Strom vom [SYS]-Port mit einem Y-Adapter (nur für + und -) beziehst. Wir empfehlen bei großen Scale-Hubschraubern die Verwendung einer separaten Servoweiche, an die Du die Servos anschließt. Dies ist die beste Option im Hinblick auf eine robuste und sichere Stromverteilung. Bitte beachte, dass der zweite Servoanschluss erst nach dem Aus- und wieder Einschalten aktiviert wird. Zum Aktivieren des Servoausgangs kannst Du auch das Mischverhältnis für das Servo an [CH6] / [CH7] in StudioX ändern. Wenn dort andererseits das Verhältnis für [CH6] / [CH7] auf 0 steht, werden die Servoausgänge über den AUX-Kanal gesteuert, der im EMPFÄNGERMENÜ zugewiesen werden kann.<br /> | |||
<br /> | <br /> | ||
<br /> | <br /> | ||
| Line 66: | Line 76: | ||
<br /> | <br /> | ||
* | * Das Höhenruderservo wird immer in den [CH3]-Anschluss gesteckt. | ||
* | * Bei elektronischer Taumelscheibenmischung müssen die beiden Querruderservos an [CH4] (links) und [CH5] (rechts) angeschlossen werden. | ||
* | * Bei mechanischer Taumelscheibenmischung (H1-Mixing) wird das Querruderservo an [CH4] und das Kollektiv-Servos an [CH5] angeschlossen.<br /> | ||
<br /> | <br /> | ||
<br /> | |||
<br /> | <br /> | ||
Latest revision as of 11:16, 20 August 2024
Punkt B vom SETUPMENÜ dient zur Auswahl der Ansteuerfrequenz (Pulsrate) der Taumelscheibenservos. Um die Leistung des BEASTX Systems zu maximieren, gilt die Regel: je höher, desto besser! Mit einer hohen Frequenz berechnet das System Korrekturbewegungen häufiger und sendet infolgedessen öfter neue Befehle an die Servos. Dies ermöglicht eine wesentlich höhere Präzision bei der Steuerung und Stabilisierung. Das bedeutet aber auch, dass die Servos innerhalb eines bestimmten Zeitraums mehr Positionsänderungen durchführen müssen. Wenn Dein Servo nicht für diese Art von Anwendung ausgelegt ist, kann dies zu einem hohen Stromverbrauch der Servos führen und dazu, dass die Servos sehr heiß werden. Wenn dies passiert, reduziere die Frequenz sofort, um zu verhindern, dass Deine Servos beschädigt werden. Gehe nur so hoch, wie vom Servohersteller empfohlen, oder sogar niedriger, wenn der Servo nicht in der Lage ist, solch hohe Frequenzen unter Last zu bewältigen.
Hinweise:
- Wenn Du ein Servo verwendest, das eine höhere Frequenz erlaubt, als am BEASTX System einstellbar ist, oder das eine maximale Frequenz zulässt, die nicht ausgewählt werden kann, wähle bitte die nächst kleinere Frequenz oder stelle die genaue Frequenz über die StudioX-App ein. Die Verwendung einer niedrigeren Frequenz ist immer möglich. Nur zu hohe Frequenzen können das Servo beschädigen und/oder dazu führen, dass das Servo nicht ordnungsgemäß funktioniert. Hier findest du eine Liste mit Parametern für die gängigsten Servos. Bitte beachte, dass wir nicht alle Servotypen auflisten können. Wir können auch nicht die Genauigkeit dieser Daten garantieren. Frage den Hersteller der Servos oder Deinen Servohändler nach detaillierten Informationen.
- Bei hohen Frequenzen laufen einige Servos ruckelig, insbesondere extrem schnelle und stellgenaue Servos mit Coreless oder Brushless Antrieb. Dies liegt an der hohen Aktualisierungsfrequenz, die das Servo erhält. Dies ist nicht kritisch und wirkt sich nicht auf die Flugleistung aus.
Wenn du nicht weißt, welche maximale Ansteuerfrequenz von deinen Servos toleriert wird, wähle nicht mehr als 50Hz aus. Eine zu hohe Ansteuerfrequenz kann zum Ausfall der Servos führen!
Einstellung am Gerät
Stelle die Ansteuerfrequenz für die Taumelscheibenservos durch Auswahl über den Hecksteuerknüppel so ein, dass die Status LED Farbe bei Punkt B in der passenden Farbe leuchtet:
| Status-LED | Ansteuerfrequenz |
|---|---|
| violett | 50 Hz |
| rot blinkend | 65 Hz |
| rot | 120 Hz |
| blau blinkend | 165 Hz |
| blau | 200 Hz |
Hinweis: Wenn über die StudioX App ein anderer Wert eingestellt wurde, ist die Status LED aus. Du kannst hier jederzeit mit dem Hecksteuerknüppel einen der vorgegebenen Werte auswählen, der benutzerdefinierte Wert wird dann aber gelöscht!
StudioX-App
Wähle eine voreingestellte Frequenz, indem Du eine der Schaltflächen bei Menüpunkt B (Ansteuerfrequenz Taumelscheibe) anklickst, oder stelle eine benutzerdefinierte Frequenz ein, indem Du auf das Zahnrad klickst und dann den Wert direkt mit dem Drehrad änderst. Mit einer benutzerdefinierten Frequenz kannst Du eine Wiederholrate von bis zu 400 Hz einstellen. Das ist mehr als ausreichend, selbst für die schnellsten Servos auf dem Markt.
Servos anschließen
Nachdem Du die richtige Aktualisierungsfrequenz eingestellt hast, stecke die Taumelscheibenservos ein. Achtung: Installiere die Servohörner noch nicht, da die Servos beim ersten Einschalten blockieren und beschädigt werden könnten! Setze die Servohörner erst auf, nachdem die Servos angesteckt wurden.
Wenn du die Kabel in deinem Modell verlegst, achte darauf, dass keine Zugspannung am Flybarless System anliegt. Stelle sicher, dass das Gehäuse frei beweglich ist, und keine Vibrationen über die Servokabel auf das Gerät übertragen werden. Die Kabel sollten nicht in der Nähe des Gehäuses gebündelt oder befestigt werden. Verwende insbesondere keinen Schrumpfschlauch, um die Verkabelung in unmittelbarer Nähe zum Punkt, an dem die Kabel in das BEASTX-System eingesteckt sind, zu bündeln oder zu umhüllen. Dies macht die Kabel steif und unflexibel und kann Vibrationen verursachen! Es ist nach unserer Erfahrung besser, wenn sie einige Zentimeter frei liegen und flexibel bleiben. Danach sollten sie so am Heli befestigt werden, dass sie während des Fluges nicht durch die Fliehkraft hin- und her bewegt werden.
MICROBEAST PLUS / ULTRA
 |
 |
- Das Höhenruder-Servo wird immer in den [CH1]-Anschluss gesteckt.
- Bei elektronischer Taumelscheibenmischung müssen die beiden Querruderservos an [CH2] (links) und [CH3] (rechts) angeschlossen werden.
- Bei mechanischer Taumelscheibenmischung (H1-Mischung) wird das Querruderservo an [CH2] und das Kollektiv-Servos an [CH3] angeschlossen.
Zusätzliches Taumelscheibenservo für Scale Helikopter
Wenn Du einen Scale-Hubschrauber mit 90 Grad eCCPM verwendest, kannst Du ein zweites Höhenruder-Servo an den Ausgang [CH7] des MICROBEAST PLUS anschließen. Beim MICROBEAST ULTRA wird das zweite Höhenruder-Servo an den Ausgang [CH6] angeschlossen. Beachte, dass diese Ausgänge nur Signalausgänge sind. Du musst das Servo daher anderweitig mit Strom versorgen, z. B. indem Du den Strom vom [SYS]-Port mit einem Y-Adapter (nur für + und -) beziehst. Wir empfehlen bei großen Scale-Hubschraubern die Verwendung einer separaten Servoweiche, an die Du die Servos anschließt. Dies ist die beste Option im Hinblick auf eine robuste und sichere Stromverteilung. Bitte beachte, dass der zweite Servoanschluss erst nach dem Aus- und wieder Einschalten aktiviert wird. Zum Aktivieren des Servoausgangs kannst Du auch das Mischverhältnis für das Servo an [CH6] / [CH7] in StudioX ändern. Wenn dort andererseits das Verhältnis für [CH6] / [CH7] auf 0 steht, werden die Servoausgänge über den AUX-Kanal gesteuert, der im EMPFÄNGERMENÜ zugewiesen werden kann.
NANOBEAST
{kind=link}
{kind=link}
- Das Höhenruderservo wird immer in den [CH3]-Anschluss gesteckt.
- Bei elektronischer Taumelscheibenmischung müssen die beiden Querruderservos an [CH4] (links) und [CH5] (rechts) angeschlossen werden.
- Bei mechanischer Taumelscheibenmischung (H1-Mixing) wird das Querruderservo an [CH4] und das Kollektiv-Servos an [CH5] angeschlossen.