Manuals:MBUltraFblV5:Receiver N/de: Difference between revisions
Shornstein (talk | contribs) No edit summary |
Shornstein (talk | contribs) No edit summary |
||
| Line 3: | Line 3: | ||
<br /> | <br /> | ||
Bei Einstellpunkt '''N''' muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [IO2] oder [IO1] automatisch auf diese Position gestellt. Das ist insbesondere dann der Fall: | Bei Einstellpunkt '''N''' muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [IO2] oder [IO1] automatisch auf diese Position gestellt. Das ist insbesondere dann der Fall: | ||
* wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Signals unterbricht (z.B. bei Verwendung eines Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist) | * wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Signals unterbricht (z.B. bei Verwendung eines Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist) | ||
Revision as of 12:10, 9 March 2023
Bei Einstellpunkt N muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [IO2] oder [IO1] automatisch auf diese Position gestellt. Das ist insbesondere dann der Fall:
- wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Signals unterbricht (z.B. bei Verwendung eines Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist)
- wenn die Verbindung zwischen Empfänger und MICROBEAST ULTRA im Betrieb physisch getrennt wird
- wenn der Sender beim Einschalten des MICROBEAST ULTRA noch nicht an ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird.
- wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird
Hinweis:
- Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren.
- Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor auf "Leerlauf" programmiert werden
- Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.
Adjustment on the device
To teach the failsafe position simply set the throttle channel on your remote control to the desired position and press the button briefly. If you did not connect a function to [IO2] or [IO1] output and don't need throttle failsafe, press the button to complete setup anyway!

During failsafe setting the [IO2] or [IO1] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function. This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident.
Setup with StudioX
To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press Set to save the position. If you did not connect a function to [IO2] or [IO1] output and don't need throttle failsafe, press Cancel to complete setup!
<img class="ios" src="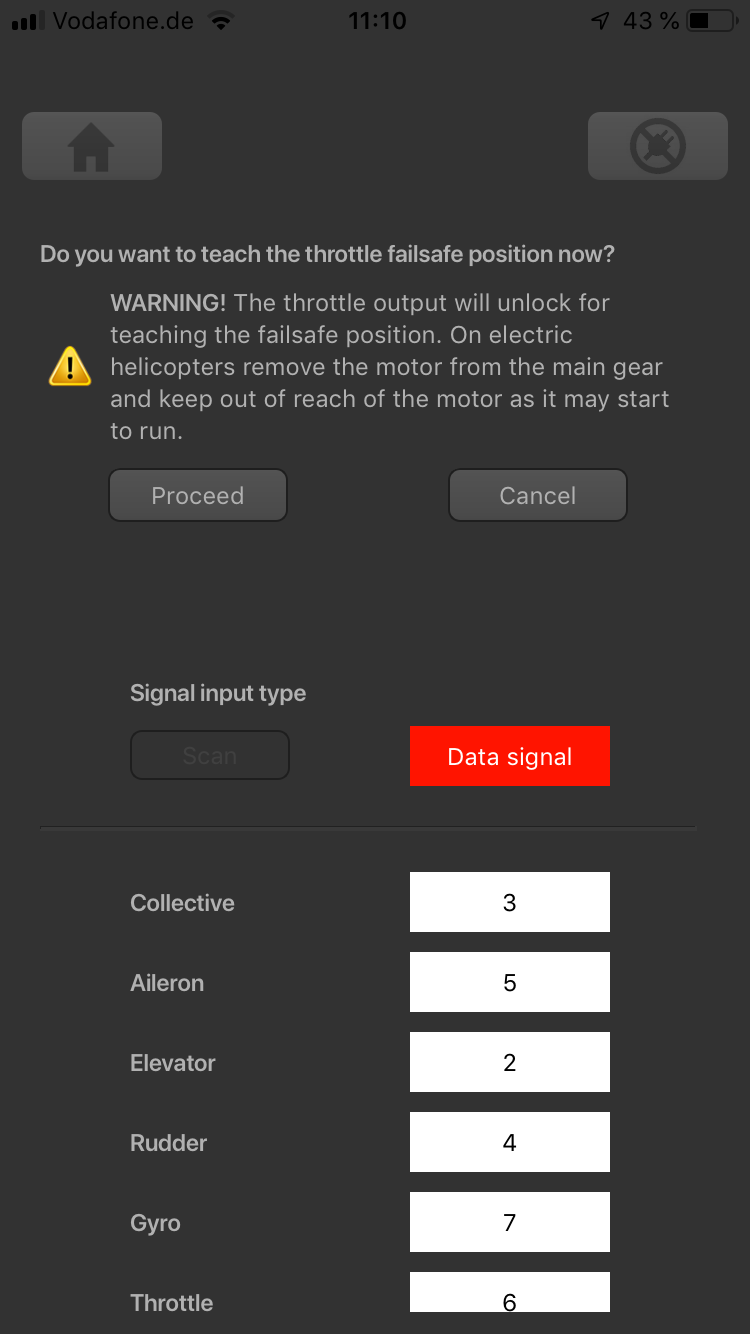 ">
">
<img class="ios" src="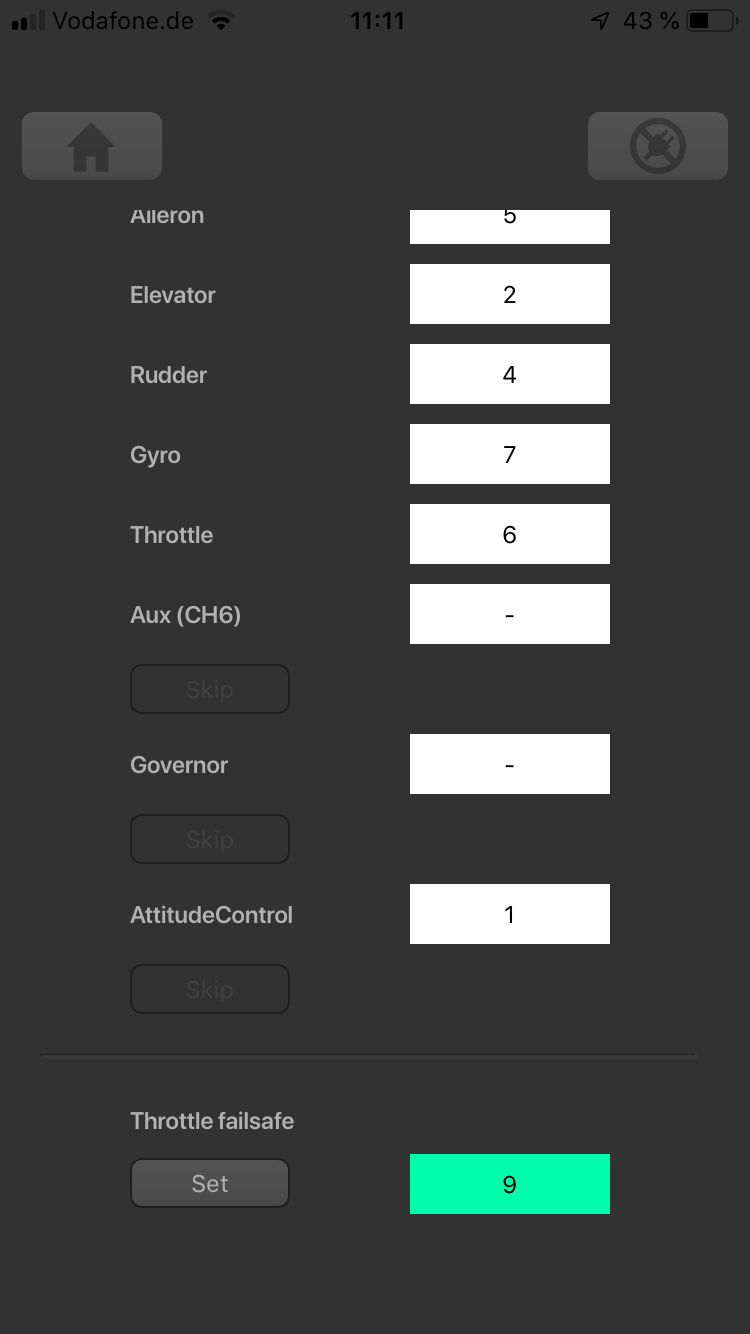 ">
">
<img class="ios" src="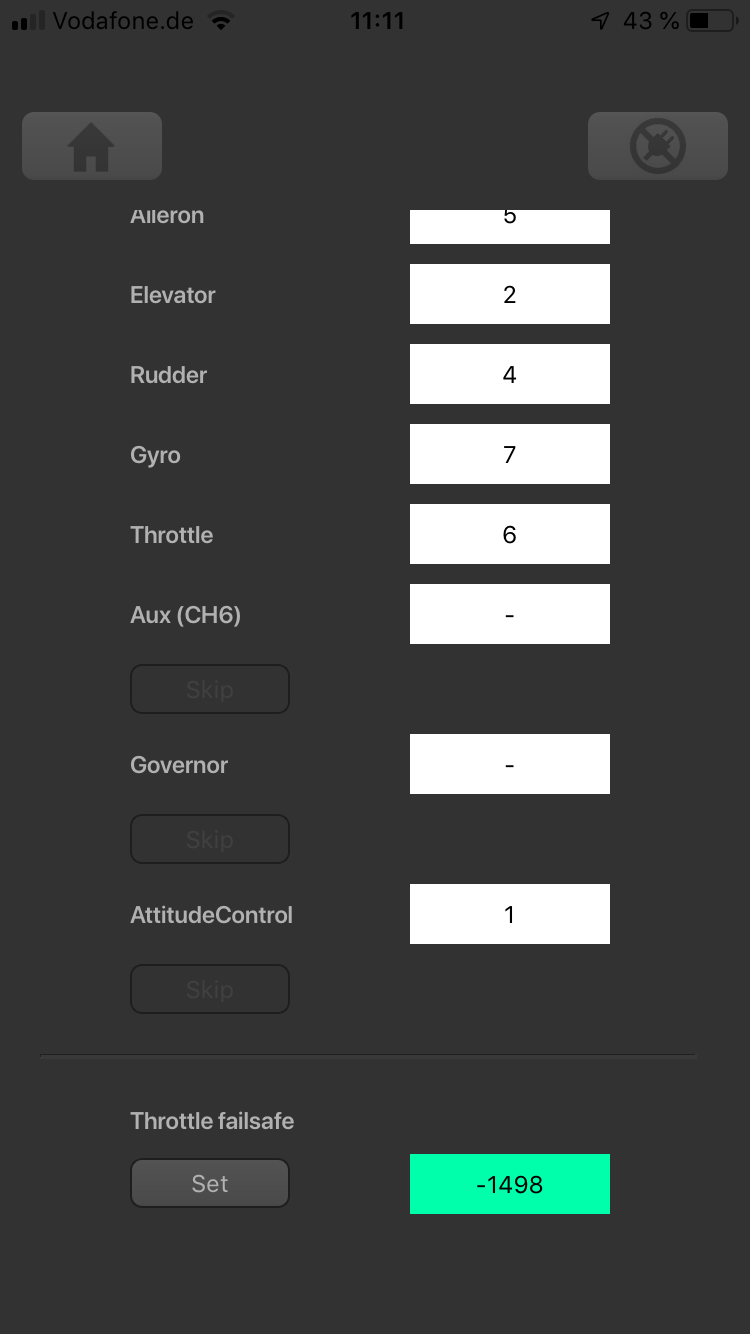 ">
">