EMPFÄNGERMENÜ - Failsafe
Bei Einstellpunkt N muss die Failsafe-Position für den Motorkanal hinterlegt werden. Sollte im späteren Betrieb das Summensignal unterbrochen werden, wird das Gasservo/der Motorsteller am Ausgang [IO2] oder [IO1] automatisch auf diese Position gestellt. Das ist insbesondere dann der Fall:
- wenn ein Empfänger verwendet wird, der im Falle einer Funkstörung die Übertragung des Signals unterbricht (z.B. bei Verwendung eines Spektrum® Satellitenempfängers oder eines Graupner® HOTT Empfängers der auf den Modus "SUMDOF" eingestellt ist)
- wenn die Verbindung zwischen Empfänger und MICROBEAST ULTRA im Betrieb physisch getrennt wird
- wenn der Sender beim Einschalten des MICROBEAST ULTRA noch nicht an ist oder die Verbindung zwischen Sender und Empfänger beim Einschalten nicht schnell genug aufgebaut wird.
- wenn der Drehzahlregler in einem Elektromodell auf Autorotation geschaltet wird
Hinweis:
- Die Failsafefunktion kann nicht funktionieren, wenn der Empfänger Daten sendet obwohl die Funkverbindung zwischen Sender und Empfänger unterbrochen ist. In diesem Fall ist gegebenenfalls eine Failsafeposition im Sender oder Empfänger einzuprogrammieren.
- Um Unfälle zu vermeiden, muss der Motorkanal auf "aus" bzw. bei Modellen mit Verbrennungsmotor auf "Leerlauf" programmiert werden
- Die restlichen Steuerfunktionen werden bei Verbindungsabbruch grundsätzlich in den Zustand "Position halten" versetzt, hier ist keine gesonderte Failsafe-Position vorgesehen.
Einstellung am Gerät
Bringe den Motorkanal an der Fernsteuerung auf die gewünschte Position und drücke einmal kurz auf den Taster. Sollte am Ausgang [CH5] kein Servo oder Motorsteller angesteckt sein, so drücke trotzdem auf den Taster um das Setup abzuschließen!

Für die Failsafeeinstellung ist der Ausgang [CH5] aktiv und reagiert entsprechend auf Bewegungen des Motorkanals, so dass die Failsafeposition kontrolliert werden kann. Trenne bei einem Elektromodell unbedingt den Motor vom Hauptgetriebe, so dass der Rotor des Helis nicht aus Versehen zu Drehen beginnt!
Setup with StudioX
To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press Set to save the position. If you did not connect a function to [IO2] or [IO1] output and don't need throttle failsafe, press Cancel to complete setup!
<img class="ios" src="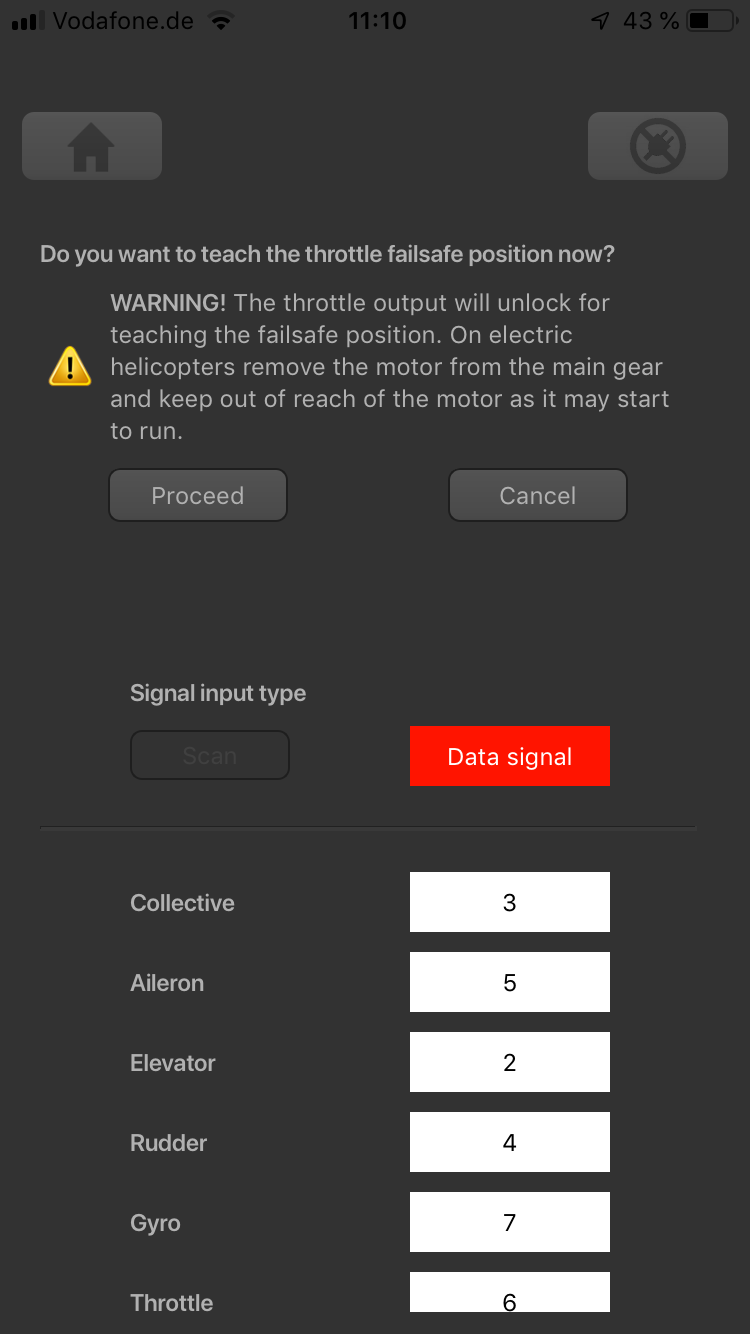 ">
">
<img class="ios" src="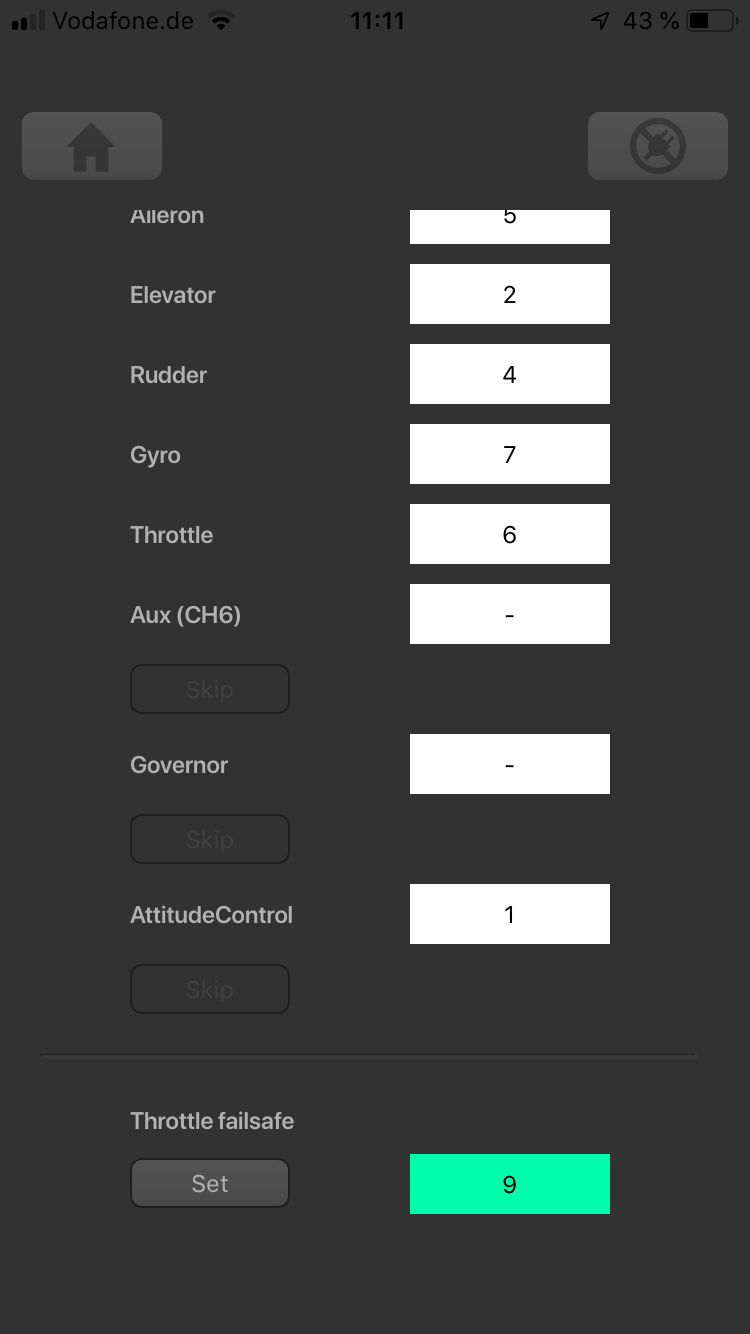 ">
">
<img class="ios" src="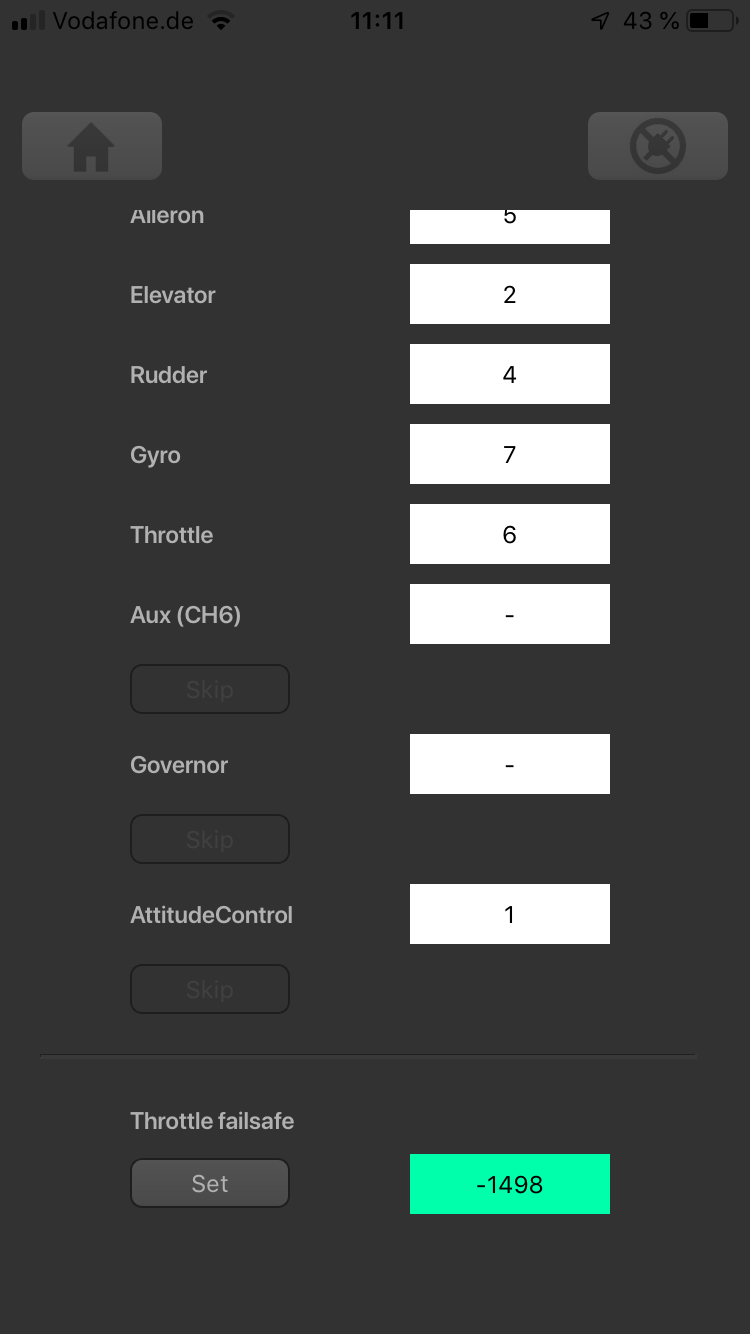 ">
">