Manuals:MBPlusFblV52:Receiver N/en: Difference between revisions
Updating to match new version of source page |
Updating to match new version of source page |
||
| Line 4: | Line 4: | ||
<br /> | <br /> | ||
At Menu Point N of the RECEIVER MENU you teach the failsafe position for throttle channel. In case the receiver signal is interrupted during operation the throttle servo/speed controller connected to the [CH5] output is automatically moved to this position. This particularly is the case: | |||
At Menu Point N of the RECEIVER MENU you teach the failsafe position for throttle channel. In case the receiver signal is interrupted during operation the throttle servo/speed controller connected to the [CH5] | |||
* if using a single-line receiver that turns off the signal in case of signal loss between receiver and transmitter (e.g. Spektrum® satellite receiver or Graupner® HOTT receiver in „SUMDOF“ mode) | * if using a single-line receiver that turns off the signal in case of signal loss between receiver and transmitter (e.g. Spektrum® satellite receiver or Graupner® HOTT receiver in „SUMDOF“ mode) | ||
* if the connection between MICROBEAST PLUS and receiver gets disconnected physically | * if the connection between MICROBEAST PLUS and receiver gets disconnected physically | ||
| Line 13: | Line 12: | ||
'''Note:''' | '''Note:''' | ||
* The fail-safe function is not effective if the receiver continues sending data even if the radio link is interrupted. In this case the failsafe setting of the remote control system may take precedence. | * The fail-safe function is not effective if the receiver continues sending data even if the radio link is interrupted. In this case the failsafe setting of the remote control system may take precedence. | ||
* To avoid accidents, you should program electric motors to “off“ and reduce throttle on nitro helicopters to idle. The other control functions will be set to „position hold“ in case of signal interruption. For these setting a failsafe position is not provided.<br /> | * To avoid accidents, you should program electric motors to “off“ and reduce throttle on nitro helicopters to idle. | ||
* The other control functions will be set to „position hold“ in case of signal interruption. For these setting a failsafe position is not provided.<br /> | |||
<br /> | <br /> | ||
=Adjustment on the device= | |||
To teach the failsafe position simply set the throttle channel on your remote control to the desired position and press the button briefly. '''If you did not connect a function to CH5 Output and don't need throttle failsafe, press the button to complete setup anyway!'''<br /> | To teach the failsafe position simply set the throttle channel on your remote control to the desired position and press the button briefly. '''If you did not connect a function to CH5 Output and don't need throttle failsafe, press the button to complete setup anyway!'''<br /> | ||
<br /> | <br /> | ||
[[File:Failsafe_setup.png|noframe|none|x180px]]<br /> | [[File:Failsafe_setup.png|noframe|none|x180px]]<br /> | ||
<br /> | <br /> | ||
{{WARNING_QUOTE|'''During failsafe setting the CH5 | {{WARNING_QUOTE|'''During failsafe setting the [CH5] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function.''' This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident. | ||
}}<br /> | }}<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
=Setup with StudioX= | =Setup with StudioX app= | ||
To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press '''Set''' to save the position. If you did not connect a function to CH5 Output and don't need throttle failsafe, press '''Cancel''' to complete setup!<br /> | To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press '''Set''' to save the position. If you did not connect a function to CH5 Output and don't need throttle failsafe, press '''Cancel''' to complete setup!<br /> | ||
<br /> | <br /> | ||
| Line 51: | Line 43: | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
{{WARNING_QUOTE|'''During failsafe setting the CH5 | {{WARNING_QUOTE|'''During failsafe setting the [CH5] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function.''' This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident. | ||
}}<br /> | }}<br /> | ||
<br /> | <br /> | ||
<br /> | <br /> | ||
Latest revision as of 12:13, 9 March 2023
At Menu Point N of the RECEIVER MENU you teach the failsafe position for throttle channel. In case the receiver signal is interrupted during operation the throttle servo/speed controller connected to the [CH5] output is automatically moved to this position. This particularly is the case:
- if using a single-line receiver that turns off the signal in case of signal loss between receiver and transmitter (e.g. Spektrum® satellite receiver or Graupner® HOTT receiver in „SUMDOF“ mode)
- if the connection between MICROBEAST PLUS and receiver gets disconnected physically
- during initialization phase when the transmitter is not switched on or was switched on too late and the radio link between transmitter and receiver is not established yet
Additionally the failsafe position is used by the Governor function in case you're using a helicopter with electric drive system. Here the throttle is moved to the stored failsafe position when you switch the Governor into Autorotation mode!
Note:
- The fail-safe function is not effective if the receiver continues sending data even if the radio link is interrupted. In this case the failsafe setting of the remote control system may take precedence.
- To avoid accidents, you should program electric motors to “off“ and reduce throttle on nitro helicopters to idle.
- The other control functions will be set to „position hold“ in case of signal interruption. For these setting a failsafe position is not provided.
Adjustment on the device
To teach the failsafe position simply set the throttle channel on your remote control to the desired position and press the button briefly. If you did not connect a function to CH5 Output and don't need throttle failsafe, press the button to complete setup anyway!

During failsafe setting the [CH5] output is enabled and can be controlled by the transmitter channel that is assigned to throttle function. This allows to check your throttle position in reality. When using electric models make sure the motor is disconnected from the ESC or the pinion is removed from the motor, so that it will not drive the model by accident.
Setup with StudioX app
To teach the failsafe position choose "Proceed" when asked to teach the failsafe position and set the throttle channel on your remote control to the desired position. Then press Set to save the position. If you did not connect a function to CH5 Output and don't need throttle failsafe, press Cancel to complete setup!
<img class="ios" src="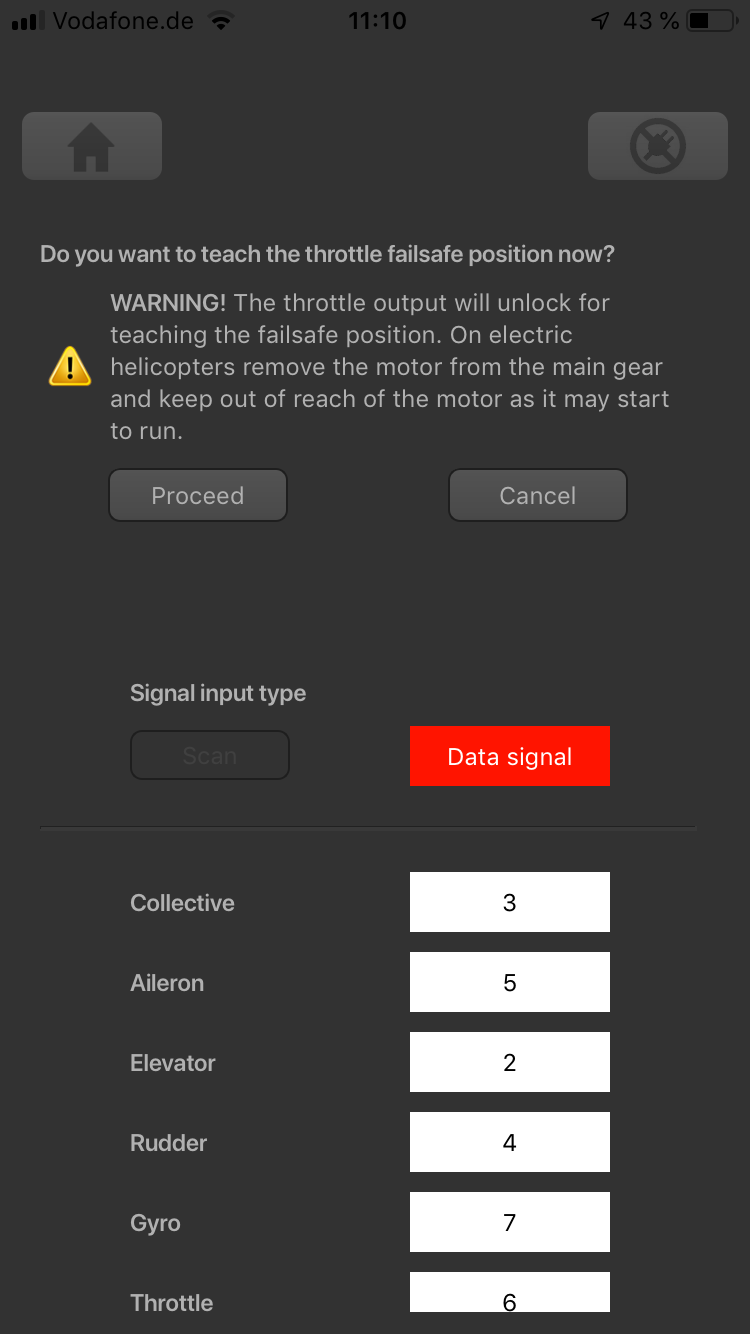 ">
">
<img class="ios" src="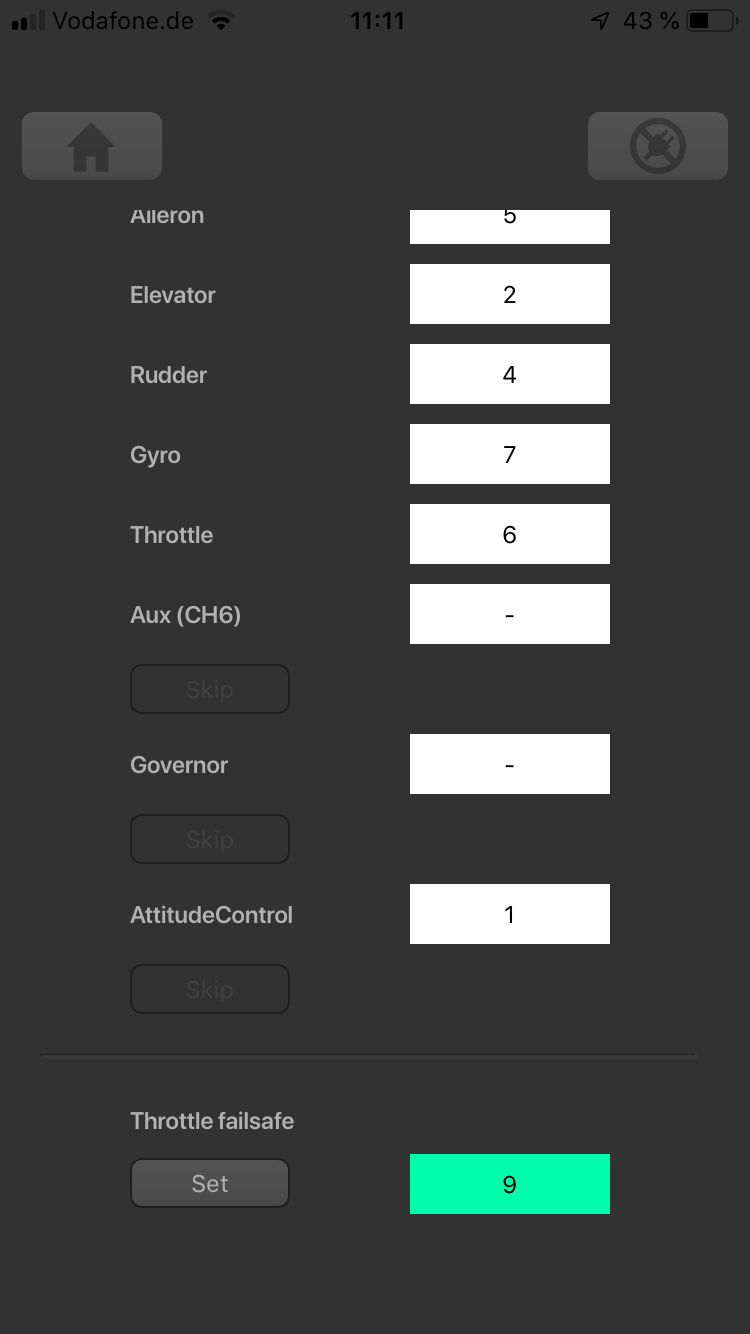 ">
">
<img class="ios" src="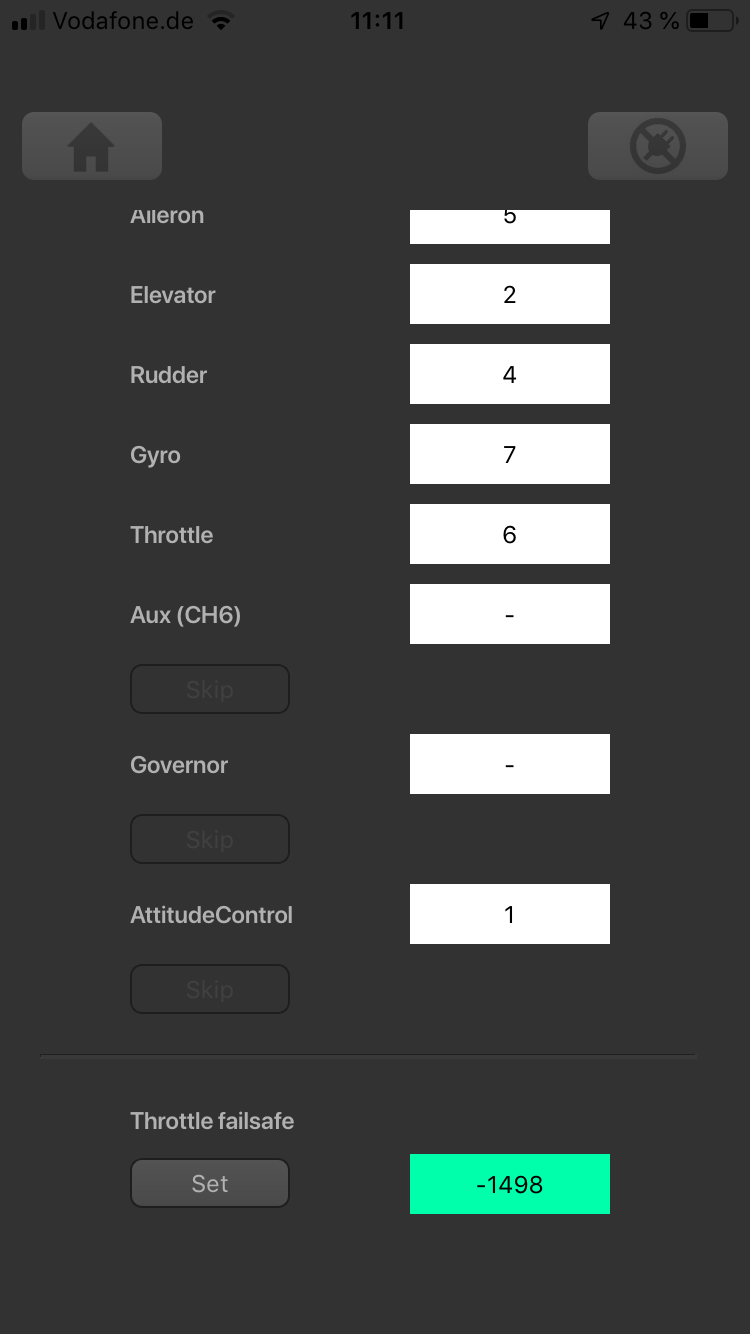 ">
">