Manuals:AR7210FblV5:Setupmenu E
Next we have to setup the rudder gyro. For this we set the limits of the tail pitch control and the control directions, so the gyro will not move the servo further than allowed and in correct direction. In first line the rudder limits are necessary to prevent the gyro from moving the servo over the mechanical limits and damaging the servo. But when adjusting the limits please note that the optimum throw is not necessarily determined by the maximum possible control travel of the tail pitch slider. When the tail mechanics allow a very high range of pitch it may be advisable to adjust the limits based on the maximum allowed angle of attack of the tail rotor blades that will not lead to an aerodynamic stall of the blades. Such stalls can cause very bad stopping behavior like overshooting of the tail when stopping from rotation and can also cause bad tail response to rudder stick input when performing directional changes. Keep this in mind when adjusting the tail rotor endpoints. Check the helicopter‘s manual to find out how much tail pitch is useful and where to set end points.
Mechanical setup of the rudder servo
In the following of this setup step you will be asked to connect the rudder servo to the AR7210BX. When doing so plug the servo connector into CH4 output at the device. Watch out for correct polarity, the black or brown minus wire must be the clostest to the bottom of the device.

Then attach a servo horn to the rudder servo in such a way that the tail linkage rod forms a 90 degree angle to the servo horn (or as close as possible) and adjust the linkage rod as described in the manual for your helicopter. For most helicopters the tail pitch slider should be centred and the tail rotor blades will then have some positive pitch to compensate for the torque of the main rotor.

This mechanical adjustment especially is important when using the tail gyro in Normal-Rate mode. If the adjustment was not done properly the helicopter will constantly drift to one side or the other on the rudder axis. When using the tail gyro only in HeadingLock mode this adjustment is not so critical. Here the gyro will actively control the rudder so the helicopter does exactly follow the commands of the rudder stick. Anyhow, for optimum performance of the gyro a good mechanical adjustment is essentially!
Adjustment on the device
Using the EasySetup adjustment on the device this setup is separated in two Menu Points. At Menu Point E we set the rudder limits, at Menu Point F we teach the control direction. At first connect the rudder servo to [CH4] port of AR7210BX now.
SETUP MENU E - Rudder limits
To adjust the servo limits move the rudder stick in one direction until the servo reaches the maximum endpoint without any binding or stall. Release the rudder stick when correct position is reached. If you moved the servo too far you can steer the stick to the opposite direction and move the pitch slider a short way back. Also you can tap the stick briefly to only make minor adjustments. Once the correct endpoint has been found, don‘t move the rudder stick anymore and wait a second for the Status-LED to flash. This will indicate that the new position was stored. (If necessary you can change position as often as you want, but always wait until the Status-LED flashes when finished and proceeding to the next step!)
Now adjust the opposite direction. For this again use the rudder stick and hold it to move the servo/tail pitch slider into the other direction. Proceed as described to set the maximum endpoint and again wait until the position has been indicated with the flashing Status LED.
When both positions have been set skip to the next Menu Point F by pushing the button on the device briefly.
SETUP MENU F - Rudder control direction
1. Move the rudder stick and check the rudder direction on the helicopter. If the stick is moving the servo into the wrong direction use the servo reverse function of your transmitter and reverse the rudder channel to set stick control direction correctly.
2. Now set the rudder direction of the AR7210BX gyro: When you move the rudder stick to the right, the Status LED must light up or flash in blue color. When you move the rudder stick to the left, the Status LED must light up or flash in red color. When the display is inverted (red = right and blue = left) reverse the display (internal control direction) by tapping the aileron(!) stick once.
3. Optional: When you move the rudder stick to full deflection, the Status LED should light solid, not just flash. If this is not the case, increase the servo throw/endpoint of the rudder channel in the transmitter just as far so that the Status LED changes from flashing to solid when the rudder stick reaches the end position. (Note: Do not increase the endpoint too much in the transmitter. We need an exact match of full stick position and stick end position. So the Status LED should just change from flashing to solid when raching the end position.)
Always set servo direction in the transmitter first, then check the display of the AR7210BX or in the software and change the internal control direction if it does not match the real direction. Do not change the internal direction in order to change the servo direction! This is only used for telling the gyro in which direction it must move the servo. Be very conscientious when doing this setup step, as wrong gyro direction will cause loss of control during takeoff and you probably crash the helicopter!
In addition you can check the gyro direction by turning the helicopter by hand around its vertical axis. When turning the heli the gyro must move the servo so that the rotor will produce a counter action agains the turn direction. So later in flight the gyro will stop the helicopter from unwanted movement. Here the LED will light up in blue color when you turn the helicopter to the right and light up in red when you turn it to the left. So you can get a little reminder when you do not know which is the correct stick direction to setup, when you need to do the setup later on the field!
Setup with StudioXm
File:SetupEF mobile.png
1. When you move the rudder stick to full deflection, the Status LED of the AR7210BX should light solid and the label right or left should change the color accordingly. If the stick is not moving far enough, you will see the message "Increase!" In this case increase the servo throw/endpoint of the rudder channel in the transmitter just as far so that the Status LED changes from flashing to solid when the rudder stick reaches the end position and the label will disappear in the software. (Note: Do not increase the endpoint too much in the transmitter. We need an exact match of full stick position and stick end position. So the Status LED should just change from flashing to solid when raching the end position.)
2. Now connect the rudder servo to [CH4] port of AR7210BX as described above and check the rudder direction on the helicopter. If the stick is moving the servo into the wrong direction use the servo reverse function of your transmitter and reverse the rudder channel to set stick control direction correctly. Now when the servo is moving correctly set the rudder direction of the AR7210BX gyro: When you move the rudder stick/servo to the right, the Status LED must light up or flash in blue color. When you move the rudder stick to the left, the Status LED must light up or flash in red color. When the display is inverted (red = right and blue = left), reverse the display (internal control direction) by choosing either normal or inverted in the software.
3. Finally adjust the servo limit by changing the values in the two adjustment boxes for each direction. To do so, carefully use the rudder stick to move the servo to the endpoint (watch out to not jam the servo) and increase/decrease the endpoint as necessary.
Always set servo direction in the transmitter first, then check the display of the AR7210BX or in the app and change the internal control direction if it does not match the real direction. Do not change the internal direction in order to change the servo direction! This is only used for telling the gyro in which direction it must move the servo. Be very conscientious when doing this setup step, as wrong gyro direction will cause loss of control during takeoff and you probably crash the helicopter!
In addition you can check the gyro direction by turning the helicopter by hand around its vertical axis. When turning the heli the gyro must move the servo so that the rotor will produce a counter action agains the turn direction. So later in flight the gyro will stop the helicopter from unwanted movement.
Extra info: Why setting stick endpoints?
This ensures that control range of the radio system matches the internal range of AR7210BX. Later when setting the control style you can adjust how fast your helicopter should turn around the vertical axis. To get reproducable results you have to match your radio to the system!
Extra info: How the gyro works!
The gyro always tries to steer in the opposite direction of the rotation that is applied to the helicopter. If you move the helicopter by hand around its vertical axis, the gyro must actuate a rudder servo movement to compensate this rotation. If for example you move the nose of the helicopter to the left (tail moving to the right), the gyro has to steer right the same way as you would steer right with the rudder stick, so that the tail is pushed back to the left.}}
-
 When moving the tail to the right by hand (nose of the heli to the left), the gyro will steer to the right, so the tail is pushed back to the left.
When moving the tail to the right by hand (nose of the heli to the left), the gyro will steer to the right, so the tail is pushed back to the left. -
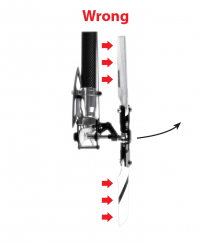 When moving the tail to the right by hand (nose of the heli to the left), the gyro steers to the left and so the tail will move even further!
When moving the tail to the right by hand (nose of the heli to the left), the gyro steers to the left and so the tail will move even further!


{kind=link}
Please note: This only shows an example for the ALIGN T-Rex 500 helicopter. Actually the tail pitch slider may move to a different position on your helicopter. This mainly depends on how the tail blade grips are controlled and how the tail mechanics is constructed in general. Check the manual of your helicopter to find out which directions the rudder must move on your helicopter.